
Jaafar Mahmoud and Ammar Ali first made it into the top 10 in 2023, having surpassed almost 500 teams from around the world. This year, the students finished ahead of 928 teams and became the absolute winners of Image Matching Challenge 2024.
For the fifth time, participants of Image Matching Challenge gathered together to solve a task related to the creation of 3D models in Google Maps. The problem is that a 3D model is supposed to be made of different images of varied quality. The solutions proposed by the participants are consequently employed by Google in their maps and other technologies (e.g., digitization of architectural objects).
“The competition combines our professional interests: that’s 3D reconstruction and geometric robot perception for me – and machine learning and deep learning for Ammar. This was our third time at the contest, and we’re sure this year’s problem was way harder. Last year, we made it into the top 10, so we decided to try our luck again to get better results and boost our skills. We always strive to find time and opportunities to grow our expertise, so there’s a good chance that you’ll see us at Image Matching Challenge again,” comments Jaafar Mahmoud.

Jaafar Mahmoud. Photo courtesy of the subject

Ammar Ali. Photo courtesy of the subject
The contest’s problems become more and more challenging each year; the team size and time constraints, however, stay the same. Whereas in 2022, participants had to generate a 3D panorama based on two input pictures, this year, they were challenged to build software to produce accurate 3D models out of images of different quality. These were photos taken in varied conditions (poor lighting, dense forest, or dark night), as well as aerial drone photography.
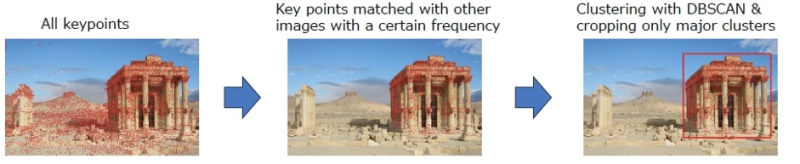
The winners’ new method of image cropping. Illustration by the developers
This year, Jaafar and Ammar’s team proposed a solution based on COLMAP, ALIKE, and LightGlue. As a starting point, their software analyzes images and calculates the accurate position of an object. After that, it identifies the photos in which the object is displaced and calculates the correct position. Then, the program eliminates identical images and, as the final move, combines the rest into a single 3D model. The technology was also presented at Image Matching: Local Features & Beyond, an annual international seminar on image matching.
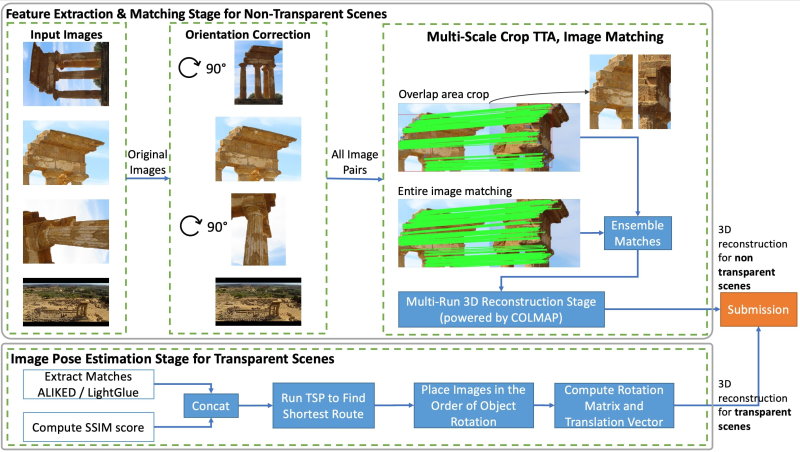
Stages of reconstruction of non-transparent and transparent objects. Illustration by the developers




