Profile
Responsibilities: an associate professor at the Faculty of Control Systems and Robotics and the team lead of a research group at the Adaptive and Nonlinear Control Systems Lab.
Research team: 20 people.
Projects: the team designs, develops, and tests robotic control systems. Among their projects is a mechanical platform that facilitates safe movement for manipulator robots and enables them to “sense” nearby people while performing a wider range of production tasks; algorithms that compensate for environmental disturbances; and “compact” neural networks that help robots quickly process data and navigate in an unknown environment – even without access to the internet.
Career path
I’ve been into programming since I was a kid – but it was never about software development. Instead, I wanted to know how I can use code to control different objects in the physical world. Driven by this idea, I decided to study programming and opted for ITMO as my alma mater. I chose ITMO because it has strong technology and programming programs and a solid reputation in training contest winners. I started the Automation & Control Bachelor’s program in 2008 and, years later, completed the then-new Master’s program Robotics, which combined everything I liked: programming, electronics, and machines.
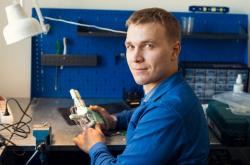
I became interested in research during my Master’s: when I was a first-year student, Anton Pyrkin, my then-supervisor and now-dean of the Faculty of Control Systems and Robotics, invited me to participate in a grant competition in adaptive control systems. The task was to come up with a way to control a vessel in rough waves and winds that move it off the course. We developed an adaptive system that evaluated the amplitude and frequency of pitching and compensated for external disturbances to keep the vessel in a fixed position; this way, the crew could collect water samples or perform any other tasks. We tested our algorithms on a 40-centimenter robotic boat we ourselves built; then, our colleagues from the Norwegian University of Science and Technology (NTNU) tested our algorithms at their laboratory.
At that point, I realized that research can be not just a hobby or a class at university, but also a proper career that brings money. After that, I continued to participate in grant contests – and even developed robotic systems for some third-party customers.
After I completed my Master’s program, I wanted to pursue science further and enrolled in a PhD program. Once I defended my thesis, I decided to stay at my alma mater – first, as a postdoc and then as a supervisor. It all came together quite naturally. There are always new researchers coming in, and I just started passing on my knowledge so we could do research together.
A later version of the roboticized model boat developed at the Faculty of Control Systems and Robotics. Photo by Dmitry Grigoryev / ITMO NEWS
Offline robots in new environments
Our team designs, develops, and tests robotic systems and, in particular, creates control systems for mobile robots.
As production processes grow more complex, the industry now requires more functional robotics. What we do is transform industrial robot manipulators, which are usually anchored to a workstation, into mobile ones, which can move along a surface and perform a wide range of tasks: for instance, picking up blank parts, transporting them to the station, collecting the finished products, and sending them to the next stage – cleaning, polishing, or painting.
To solve these problems, we work in two main areas:
Mechanics: we develop omnidirectional platforms that will allow a robot to move in all directions, overcome obstacles, and interact with equipment.
Programming: we build algorithms that will analyze which external forces affect the control system and how to compensate for them; this also helps us understand how we can collect valuable data about the environment and position the system correctly. It’s also important to account for the capabilities of electronics on hand – they should work well with our algorithms.
Apart from control systems, we also develop separate devices – or their parts, to be precise. Typically, we start off with off-the-shelf industrial manipulators that are good at performing standard tasks; then, we create new software, mechanical tooling, and electronics and start looking for new applications.
Vladislav Gromov. Photo by Dmitry Grigoryev / ITMO NEWS
Projects
My PhD students also take part in our research.
A mechanical mobile platform for an industrial robot manipulator. In the conventional approach, a mobile robot should either navigate in human-free environments or stop whenever it sees a human. Our technology will let the robot move safely among people. At its core is a custom-built platform with a deformable body. Though the deformation can’t be detected visually, it will help us collect more precise data about its interactions with the environment. We’re also adding special sensors and developing algorithms to process information from them. This way, the platform will “feel” the presence of people and thus make the robot safe for people and help adjust its position. Currently, we’re working on describing the fundamental design principles and developing a laboratory sample.
Algorithms for environmental assessment. Our goal is to “teach” robots to function in unfamiliar environments and adapt to external events. To that end, we create algorithms that allow it to compensate for outside influences or adapt to them in the process. We use non-linear models, which are described not through basic arithmetics, but through non-linear dependencies that may change throughout the robot’s use. We develop algorithms that use indirect measurements to acquire the missing data that’s needed to build a full picture and more accurately control the device. For instance, technical documentation for modern robots often instructs that you shouldn’t use them on vibrating surfaces or unstable mobile platforms. The compensatory algorithms we’re creating allow us to use robots in such circumstances – and therefore expand their area of application.
Neural networks in industrial robots. With the help of neural networks, a robot is able to navigate through an unfamiliar environment, process the data from its camera, move through spaces, and control its manipulator arm. We decided to embed neural network algorithms directly into the robot, but that’s a tough task in practice. First of all, a mobile robot cannot carry a whole server on its back. Secondly, neural networks consume a lot of energy – a single power pack won’t be enough for the whole day. That’s why we’re developing ways to “compact” neural networks and reduce their power consumption while retaining their accuracy. Our inventions will make it possible to stay independent from big corporate servers and use neural networks in robots even in remote areas without a reliable internet connection. This is particularly relevant for the mining industry – some representatives of that business sector have already reached out to us with such a request. At the moment, we’ve written up the fundamental principles and will soon get to building the first experimental prototypes.
Industry cooperation
We try to implement our scientific methods practically with the involvement of our partners – in particular, we’ve been working with the company Arrival Robotics. Right now, we’re working with VkusVill (a major Russian grocery store chain – Ed.) on a robotic kitchen, where foods will be made without human involvement. This will free the cooks from routine tasks, reduce the error rate, and accelerate production.
Vladislav Gromov. Photo by Dmitry Grigoryev / ITMO NEWS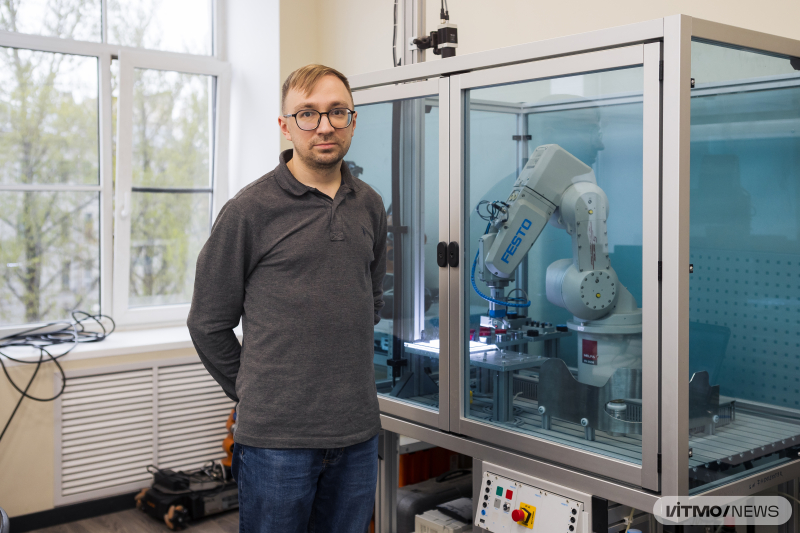
Work within the research group
In my group there are researchers and students of all levels. The size of the group varies from 10 to 20 members. Students find out about us during class, where we tell them about ongoing research.
In picking research topics, I prioritize the interests and strengths of the students. Then, I help them make sense of the fundamentals of their chosen field. This helps them create a general description of their work (a requirement for PhD students). Then, we adapt the project to a specific class of systems, formulate the task, and specify the end goal.
Some of the work is done remotely: we construct the mechanisms in Kompas-3D, test our mathematical models with MATLAB and Python, and write the robots’ control software in C++. When we get to physical implementation – assembly, electronics, testing – we transition into on-site format.
Infrastructure
We have a whole pool of robotic systems. These are: high-load industrial robots for rugged conditions, KUKA and Mitsubishi manipulator arms, and modern collaborative robots that are capable of working alongside humans. We also have our own testing ground at ITMO – here, we build devices and can quickly outfit mobile robots in order to test hypotheses or produce lab prototypes.
Vladislav Gromov with students. Photo by Dmitry Grigoryev / ITMO NEWS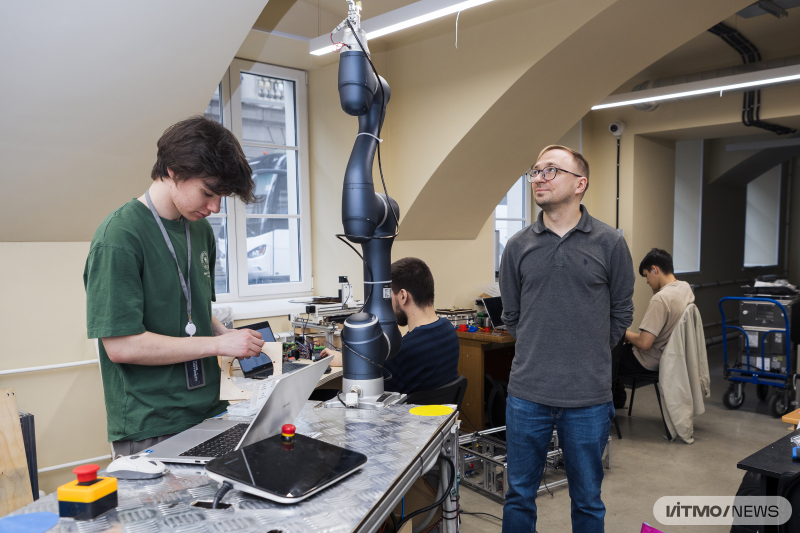
How to join the team
Students can join us during Master’s or even Bachelor’s studies. Those who want to be part of the group should be familiar with the basic working principles of control systems and controllers, as well as have experience with software for design, programming, and control.
Usually, I begin by studying the student’s background, skills, and interests. Then, we pick one of the three main subject areas: mechanics, control systems programming, or electronics. Then, we decide on a more narrow subject based off of current tasks and prominent scientific challenges.
If you plan to apply for PhD studies, it’s best to get in touch with a research supervisor in advance to discuss your future thesis. If you want to join my research group, write to me at gromov@itmo.ru.
Read more about PhD admissions at ITMO here.
We don’t just do thesis work, either. Students also develop applied projects for partner companies (with employee status and salary), complete practical training, or conduct their own research for graduation projects. I believe that the opportunity to take part in an actual research project and give your ideas a practical manifestation makes for an invaluable experience.