Принципы биомиметики
Команда магистрантов факультета систем управления и робототехники — Кирилла Насонова и Дмитрия Волянского — под руководством научного сотрудника ИТМО Ивана Борисова работает над созданием галопирующего робота с уникальными морфологическими характеристиками. Главная задача команды — разработать такую конструкцию, которая одновременно будет легкой, эластичной, энергоэффективной и при этом функциональной. Для этого используются принципы биомиметики и морфологического расчета.
Как рассказывает Иван Борисов, целью является создание такого устройства, которое будет требовать минимум управляющего усилия, то есть энергии, и при этом сможет перемещаться по пересеченной местности, преодолевать препятствия и будет устойчиво к физическим повреждениям.
Иван Борисов, научный сотрудник Университета ИТМО:
«Наша задача состоит в разработке методов проектирования роботов, способных работать в условиях неструктурированной и неизвестной среды. В качестве платформы для апробации методов и принципов проектирования мы разрабатываем галопирующего робота, способного быстро и энергоэффективно перемещаться. Современные шагающие или галопирующие роботы, например Spot или Unitree, в основном представляют собой такую “табуретку на ножках” — это абсолютно жесткое тело с ногами открытой кинематики. Они показали свою эффективность: они действительно могут ходить, бегать, взбираться на лестницы и даже крутить сальто, но они тратят очень много электроэнергии. Бег — это периодическое движение.
При беге механизмы ног открытой кинематики совершают колебательные движения. Так вот, современные роботы тратят энергию на каждом этапе цикла бега: на ускорение звена ноги, ее торможение, ускорение обратно, снова торможение, после чего цикл повторяется.
Мы же хотим добиться энергоэффективного движения, для чего используем принципы биомиметики, то есть смотрим, как природа решила те же задачи за миллионы лет эволюции, и переносим уникальные характеристики живых систем в робототехнические системы. Один из самых энергоэффективных и наглядных способов перемещения — это прыжки кенгуру. Кинетическая энергия тела кенгуру при ударе преобразуется в потенциальную энергию, накопленную в сухожилиях и мышцах, которая преобразуется обратно в кинетическую при отскоке. Аналогичный принцип прыжка мы заложили в разработанном прототипе робота».
Морфологическое проектирование
Энергоэффективность — это умение эффективно использовать ограниченный бюджет электроэнергии. Для экономии управляющего усилия электродвигателей можно сделать такую конструкцию робота, в которой большая часть требуемой динамики будет обусловлена механикой, а задача системы управления сведется к стабилизации и дополнению динамики робота. Такой принцип проектирования называется морфологическим расчетом (morphological computation), при котором «расчет» законов управления реализуется в большей степени на уровне механики, а не на уровне алгоритмических преобразований.
За счет оптимального распределения в роботах массы, эластичности и оптимизации параметров механизмов можно получить требуемую динамику и при этом использовать меньшее количество двигателей, при этом слабомощных.
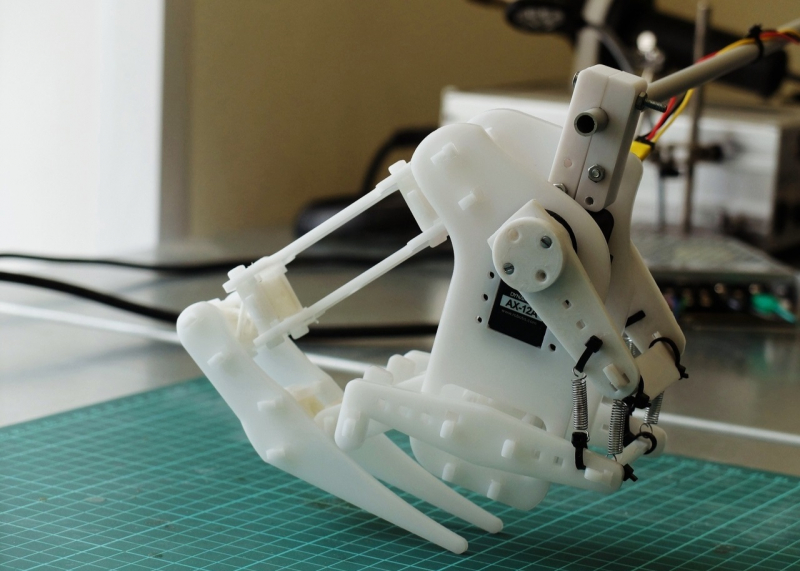
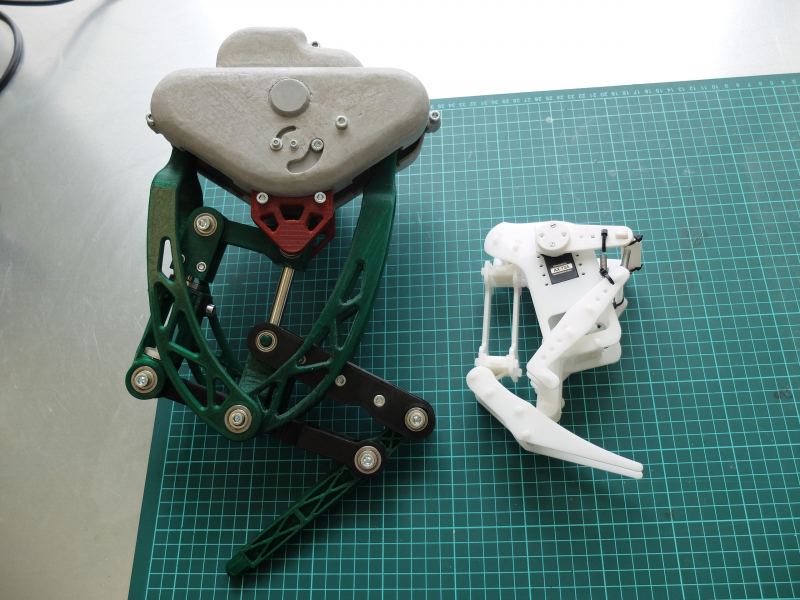
«Основным актуатором в этой системе является пружина растяжения: при падении робота она растягивается и накапливает потенциальную энергию, а при отскоке эта запасенная энергия преобразуется обратно в кинетическую энергию. Таким образом, происходит рекуперация энергии, а работа двигателя сводится к компенсированию потерь энергии на удар и трение», — объясняет Иван Борисов.
Гибкие элементы
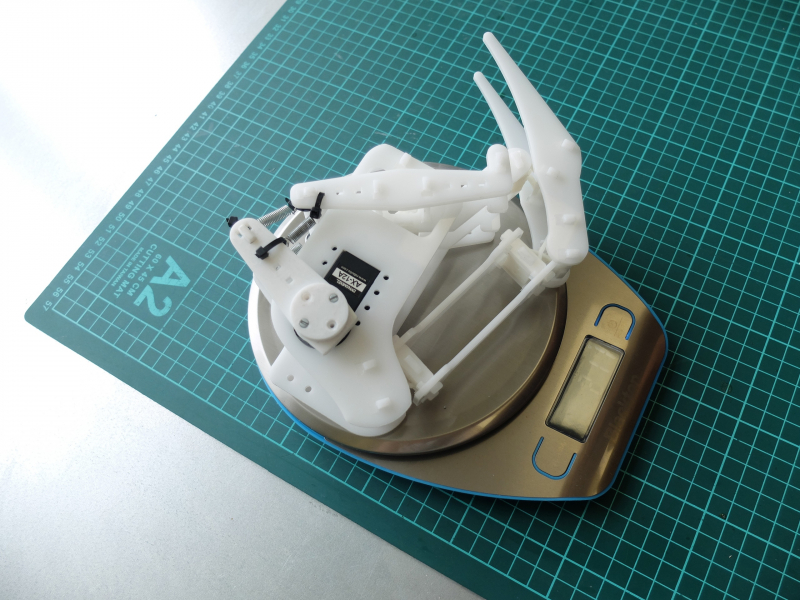
Кроме того, для достижения высокой энергоэффективности потребовалось максимально облегчить корпус робота — избавиться от тяжелых элементов конструкции: зубчатых колес, металлических осей и подшипников. Для решения второй задачи были применены результаты исследований университета-партнера ИТМО — Университета Твенте.
«У нас была теория про гибкие сочленения — они могут совершать поворот на определенный угол, при этом они легкие, у них отсутствуют трения и люфты. Встал вопрос о том, как это вообще проектировать. Сама задача проектирования сочленений является нетривиальной — мы не можем просто взять, допустим, пластик и соединить его под каким-то углом — это все рассчитывается математически. В Университете Твенте есть лаборатория, которая этим занимается. И, к счастью для нас, их труды являются открытыми. Мы можем посмотреть, как они это делают, и на основе этого получить свое решение», — рассказывает Кирилл Насонов.
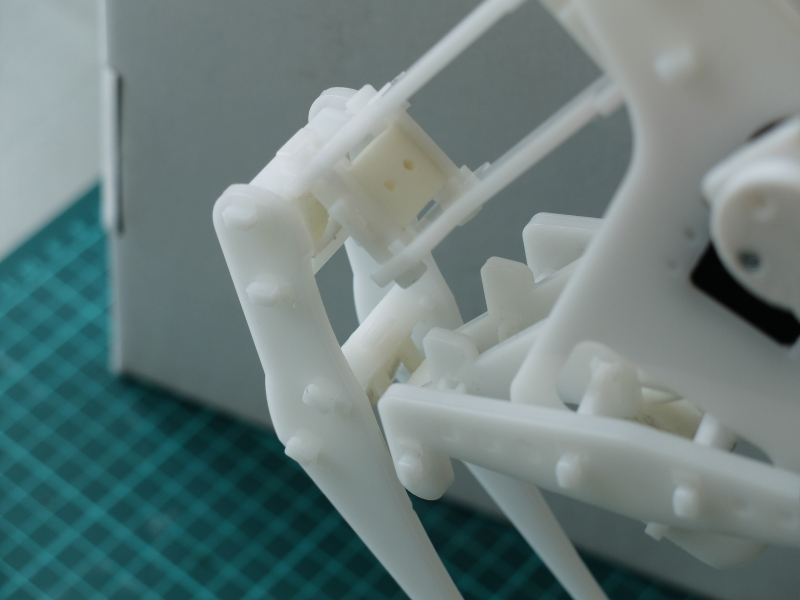
В Университете Твенте, в лаборатории Дэниса Броуэра, синтезируют механизмы с гибкими сочленениями преимущественно для обеспечения высокоточного движения. В проекте Университета ИТМО механизм с гибкими элементами был синтезирован для обеспечения силового взаимодействия механизма с окружением. Сочленения были напечатаны на трехмерном принтере из полиуретана, гибкого пластика с тянущейся структурой. Сочленения имеют трехлистную геометрическую форму — именно она обеспечивает необходимые параметры упругости, прочности и стойкости к деформациям.
Все остальные детали робота также изготовлены из пластика: корпусные детали и все соединения нарезаны на лазерном станке из полиацеталя и скреплены с помощью пластиковых клипс.

Прототип для тестирования
Прыгающий робот — это не конечный продукт, а, скорее, объект для апробации способов морфологического проектирования, в частности, гибких сочленений — до этого подобных роботов таким образом не конструировали. Также галопирующий робот — наглядный пример для изучения методов управления и динамических систем в их взаимодействии с окружением.
«Мы использовали двигатели с последовательно присоединенной эластичностью и реализовали способ управления не по ошибке положения, а по ошибке потенциальной энергии, запасенной в пружине. Ребята заканчивают первый год магистратуры, и это результат их работы за год. Они смогли попробовать на практике навыки инновационного моделирования, нестандартных способов управления, проектирования, производства деталей, а также получили навыки программирования контроллера», — рассказывает Иван Борисов.
В дальнейших планах команды — сделать робота, который не только прыгает на месте, а полноценно передвигается по пересеченной местности. Для этого необходимо синтезировать более сложный механизм ноги, который будет способен реконфигурировать траекторию движения.



