Could you tell us more about your background?
AO: I got my Bachelor’s at ITMO, too. Back then, I studied management systems and computer science. My specialization was a lot like today’s robotics one: nearly all practical tasks we had were focused on robot programming and the synthesis of control algorithms. When I had to decide what to do for my Master’s, I went for intelligent robotics. This was partly because it was an international program and I had the chance to graduate with two diplomas.
MK: I studied system analysis and management as a Bachelor’s student at Tomsk State University of Control Systems and Radioelectronics (TUSUR University). The program had a bit of a different focus. We paid more attention to ecological systems, business processes, and alike.
I had some background in robotics before I got into a Master’s program. I worked at a local organization that offered educational courses for school students. There, I did projects for 7th and 11th graders. I was lucky to get into ITMO without taking any entrance exams. I chose to study here because ITMO is one of the best universities, and many of my textbooks were written by ITMO lectures and professors.
Why did you decide to study robotics?
AO: I’ve been into programming since school. When I was in seventh grade, I started to learn to code on my own. I took various courses and watched tutorials. I was going to become a programmer but then I realized that I didn’t want to just code and create apps, I was much more interested in developing algorithms and programming robots – so to say, create something real backed up by mathematics.
I was drawn by the breadth of robotics. To be a successful specialist, you have to be well-versed in programming, design, and mathematics. This is much more exciting than just writing code all the time. I’m also sure that robotics is a promising field. Though the robotics sector is only developing in Russia, such experts are already in high demand.
MK: When I finished school, I thought I’d not go to university at all. I felt like I didn’t need a degree, after all, I was already an IT specialist at that time.
But then some unexpected events that happened in our country completely changed the way I saw the situation in the world. I realized I had to take action. And the best thing you can do when everything is uncertain is to invest in yourself and your education. Since I had no idea about what I wanted to study, I decided to try something universal. By chance, I came across a robotics program at TUSUR University. I read its description and understood that it was my best choice since robotics includes a systematic approach, system analysis, and process management. In a way, all these skills are applicable to any field.
The robot at ITMO’s Adaptive and Nonlinear Control Systems Lab. Photo by ITMO.NEWS
Why did you choose academia over industry?
MK: I knew I wanted to do science when I first started my Bachelor’s program. But then, I began having second thoughts about it. I questioned myself and my abilities but my supervisor inspired me to follow my dream. As I get my PhD, I plan to stay in academia. This feels right to me.
I believe the best thing about our university is the incredible team of talented people that I get to work with. We have ongoing collaborations with top-notch scientists and practicing specialists. This is one of the greatest opportunities you get when being a Master’s or a PhD student at ITMO. That is probably part of the reason why I’m doing well at university. I came from a different town and couldn’t work full-time yet thanks to ITMO, I got access to all kinds of laboratories and began working on various projects.
AO: People are indeed great here. This was a deciding factor for both of us. I’ve thought long and hard about whether I should apply or not. I knew that the university could give me those skills that I wouldn’t get working in the industry. This is primarily in-depth fundamental knowledge that would make me a better expert in my field. What’s more, here I learned to work in a team and also run my own, as well as got better in communication and time management.
I love the fact that we have the chance to try our hand at something new to us. Often, the problems we encounter have no solutions yet and we get to be creative when trying to find one. We also can switch between projects, not do the same again and again. After all, it’s hard to do the same projects every day for about a year and even more. That’s what makes academia different and more flexible. If you’re working in the industry, you have to be engaged in one project for years on end.
The university offers many project opportunities, too. That’s something I’ve always enjoyed. We have access to various equipment and even robots – not all students can say the same. And, of course, academic mobility programs. My colleague and I went to South Korea, Japan, and Canada, and participated in various competitions.

Alexei Ovcharov at the RoboCup 2017 in Japan. Photo courtesy of the subject

Alexei Ovcharov and other contestants at RoboCup 2018. Photo courtesy of the subject
Speaking of collaborations, have you had such an experience?
AO: We have close ties with industry. We worked with Arrival (former TRA Robotics), Diacont, and Starline. We created mobile robots for the latter. Not only them, but we also collaborated with multiple companies in materials processing.
I worked at Airlab, too. There, we developed a robot artist. It took a while to bring this idea to life – not to mention many consultations with programmers. Now, as part of a huge team, we’re creating another robot artist for RoboHood. I like that while studying at university, we’re free to work on projects for our customers, too.
We’re still working with Arrival. We did a project for them and were frequent visitors to their office and labs. I think that these collaborations helped me understand what I wanted to do with my life career-wise.

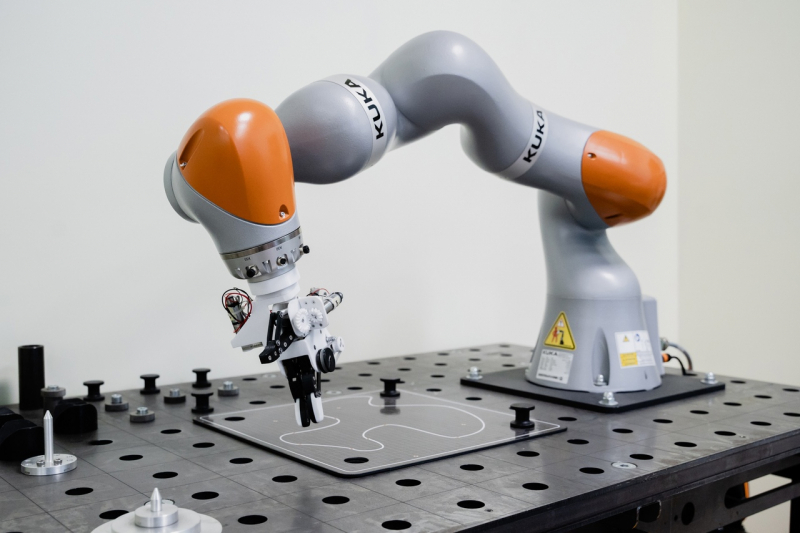
The robot artist. Photo courtesy of the developers
What is your thesis about?
MK: I’m engaged in the development of robust control algorithms. Now, for instance, we’re implementing our grant project that received the support from the Russian Science Foundation. This project is about the control of an autonomous small-sized floating vessel for environmental monitoring of water bodies. My task is to develop an efficient algorithm that can ensure the stability of the controlled vessel. In my thesis, I combined classical control algorithms and machine learning to obtain a system that provides greater control in real time, thus making it not only safe but also efficient.
I started my research when I was still a Master’s student. I was an intern at Navis Engineering – the company that designs positioning systems for large surface combatants. I acquired an interest in the topic and eagerly studied it. We also backed our idea up with scientific studies. Our project yielded first results, and my supervisor and I took a chance and submitted an application to receive a grant. This allowed us to carry on our research, turn our idea into a full-fledged system, as well as perfect not only our control algorithms but also smart contracts, navigation planning, and so on.
AO: Mikhail and I work in similar fields, such as manipulator control. However, my interests lie in control and assessment methods for electromechanical systems. This could be the position control of quadcopters, the navigation of mobile robots in a confined space, the control of synchronous motor drives, object segmentation and classification using a camera, or machine learning methods in electromechanical systems.
As part of the Arrival project, we created sensorless torque control methods for articulated manipulators. It’s when force transducers serve as tactile sensors and are used to put, distort, or bend something to a certain angle. This is a common plane grinding, cutting, and milling method. By doing so, we tried to remove force transducers from the chain control circuit because they are just as expensive as robots.
Now, I mainly focus on a novel evaluation method. This is a rather universal method that can solve the problem of redundant parameterization – what is called retraining in neural networks. The results of our study are already featured in Q1.
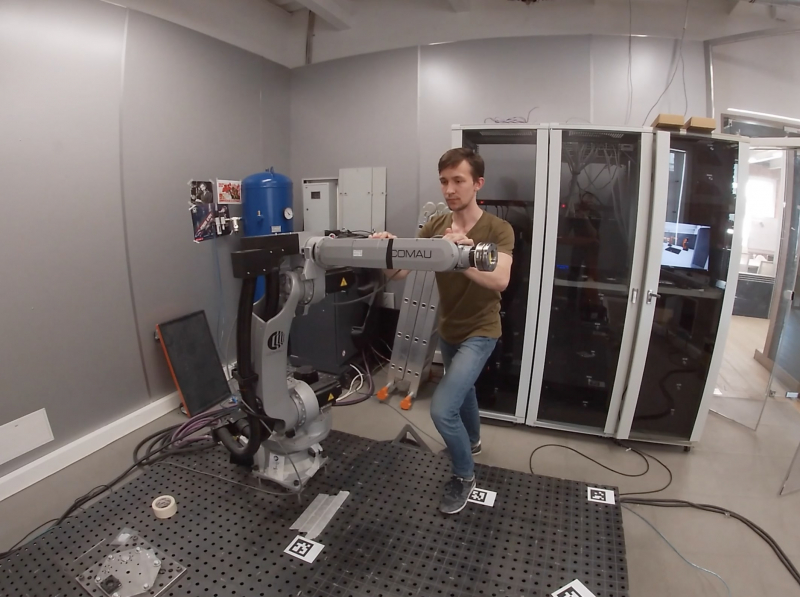
The project for Arrival (TRA Robotics). Photo courtesy of the subject
What would you like to do in the future?
MK: I’d like to stay at ITMO but at the same break through internationally. After I obtain my PhD, I’ll probably apply for a postdoc position in Finland or Switzerland. It’s my dream but I’m not sure if it’s going to come true. I’m also interested in working in the industry so I don’t rule out this possibility, too.
AO: Just like Mikhail, I’d love to collaborate with other universities and continue my work at ITMO. Our university has no problem with its employees working on the side. Many people participate in international research and it’s common when employees go abroad to work and travel back as often as they can. Such collaborations are valued and encouraged since they are a great way to meet like-minded people and find new grounds for joint work.
People quickly get bored working at a company. Companies tend to use tried-and-true algorithms, which are not always the best solutions in terms of design. And I want to do something theoretical and find new spheres of application for the same systems.
I believe that specialists like us are valuable and quite unique. Experts mostly work with what they have on their hands or what they already know. And university education means that you constantly learn something new, come up with new innovative ideas, and communicate with other people. Mikhail and I regularly discuss things, read scientific papers, help each other, and develop formulas. And I’m beyond grateful to have this in my life.