
Профиль:
Чем занимается: создает математические алгоритмы управления сложными робототехническими системамиКоманда: более 20 человек
Проекты: в рамках проекта «Технологии воплощенного интеллекта в робототехнике» команда Олега Борисова разрабатывает систему монокулярного зрения ― такая система позволяет реконструировать трехмерные сцены с использованием всего лишь одной камеры. Среди других проектов ― разработка алгоритмов управления движения различных робототехнических систем и, в частности, маломерных роботизированных плавательных средств.
«Для ученых естественно объединяться в команды»
В школе я учился в Знаменске, это небольшой закрытый город в Астраханской области недалеко от Волгограда. В школьные годы мне больше всего нравились физика, математика и информатика, в этих предметах я чувствовал свой потенциал. Поэтому было очевидно, что поступать нужно в технический вуз. К тому же, в моей семье прекрасно знали об ИТМО, и я изначально хотел попасть именно сюда. А вот с выбором направления оказалось сложнее.
Когда я пришел в университет на день открытых дверей и собирался выбрать факультет, растерялся ― названия плыли перед глазами, казалось, что все крутится вокруг одних и тех же слов. Но среди всего этого многообразия меня привлекли «компьютерные технологии и управление» ― так назывался факультет, на который я поступил (сейчас ― мегафакультет компьютерных технологий и управления). Сначала рассматривал поступление на безопасность информационных технологий (входит в состав мегафакультета ― прим.ред), но волею случая попал на кафедру систем управления и информатики (сейчас ― факультет систем управления и робототехники), хотя тогда не вполне понимал, что вообще всё это значит. Но в итоге ни о чем не пожалел. На протяжении карьеры я ни разу не менял свое научное направление, а наоборот развивал его и расширял.
В ИТМО я окончил бакалавриат, магистратуру, аспирантуру, защитил кандидатскую диссертацию. И так получилось, что моя научная карьера органично вплелась в обучение. Сначала работал инженером, потом ассистентом, а после защиты диссертации полноценно перешел на позицию PI ― с этого момента уже под мое научное руководство стали приходить магистранты и аспиранты. Сейчас у меня работают пять аспирантов.
Мой путь к PI был очень естественным. Для ученых вообще естественно объединяться в команды. Не зря же существует научное сообщество, проходят конференции, на которых собираются исследователи и делятся идеями. Вся работа ученого так или иначе сводится к взаимодействию с коллегами, к воспитанию учеников. Еще во время своего обучения я часто слышал от руководства, что сила нашего исследовательского коллектива в команде. Тогда мне казалось странным, что мне, тогда еще магистранту, говорили, что надо не просто набирать какие-то индивидуальные достижения, но и формировать вокруг себя группу, уже начинать готовить учеников. Но это абсолютно верный подход, потому что именно команда помогает впоследствии решать более сложные, комплексные задачи.
Олег Борисов с командой. Фото: Дмитрий Григорьев / ITMO.NEWS
Простые алгоритмы для сложных систем
Еще во время обучения в аспирантуре я вместе с командой участвовал в реализации нескольких проектов. Первый, условно его можно назвать софтовым, был посвящен созданию математического алгоритма бездатчикового очувствления робота-манипулятора. А второй (он касался именно «железа») непосредственно связан с разработкой захватных устройств.
Бездатчиковый подход предполагает, что мы разрабатываем такие математические алгоритмы, которые позволяют заменить физические измерения их оценками и решать по сути аналогичные задачи, что и с датчиками, но без их непосредственного использования. Это позволяет отказаться от какого-то очень дорогого или очень тяжелого датчика, заменив его умными алгоритмами. Например, в случае с манипуляторами мы старались разработать такой алгоритм, который позволит нам устранить силомоментный датчик, но в то же время по-прежнему эффективно оценивать силу взаимодействия робота с окружающей средой.
В итоге мы такой алгоритм получили, представили его индустриальному заказчику. А совсем недавно на него был оформлен международный патент. По второму проекту мы разработали несколько версий захватных устройств, их чертежи были также переданы заказчику. Сейчас эта работа завершена, но наработки, которые мы использовали в рамках этих проектов, во многом помогли нам перейти к созданию других устройств ― в том числе галопирующих роботов, над которыми работает команда Ивана Борисова. Поэтому самый важный результат, который они принесли ― это команда, которая осталась и теперь работает над новыми задачами.
Прототип энергоэффективного галопирующего робота, разработанный командой Ивана Борисова на факультете систем управления и робототехники ИТМО. Видео: Екатерина Шевырева / ITMO.NEWS
Сейчас мы решаем как фундаментальные, так и прикладные задачи. Например, в рамках президентского гранта с соисполнителем Андреем Живицким мы разрабатываем и исследуем алгоритмы управления движения различных робототехнических систем. Это задачи, которые касаются разного рода устройств ― манипуляторов, квадрокоптеров, электроприводов и много другого. На фундаментальном уровне мы подходим к задаче синтеза управления нелинейным объектом с неопределенностями в общем виде и далее на прикладном уровне применяем разработанные алгоритмы к различным робототехническим приложениям.
А другой большой проект ― «Технологии воплощенного интеллекта в робототехнике» ― реализуется в рамках программы «Приоритет-2030» вместе с индустриальными партнерами. Здесь мы уже большой командой, прикладной блок которой координируется Сергеем Колюбиным, занимаемся непосредственно разработкой программно-аппаратных решений.
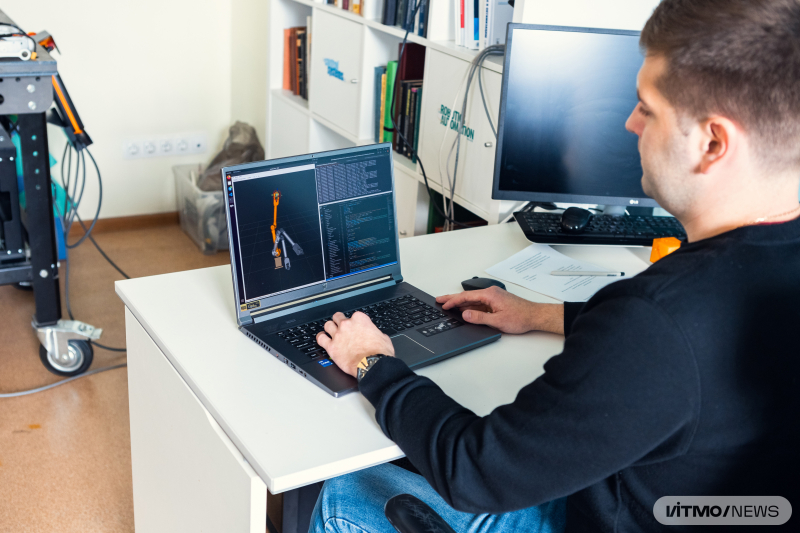
Проект рассчитан на три года. В июле 2022-го мы уже продемонстрировали первые результаты. Мы разработали программно-аппаратный комплекс монокулярного зрения для реконструкции трехмерных сцен. С одной стороны, это аппаратное решение. А с другой ― оно включает в себя серьезную программную часть на основе умных алгоритмов, которые позволяют снизить требования к железу. Как? Эта система позволяет выстроить метрическую карту трехмерной сцены с использованием не двух камер, как это обычно делают, а всего одной. Используя умные математические алгоритмы, мы можем обойтись всего одной камерой, чтобы оценить глубину и построить трехмерную карту помещения.

Сейчас уже создано конкретное устройство ― оно имеет две версии. Первая ― это портативное устройство, которое может использоваться независимо для реконструкции трехмерных карт. Изображение карты при этом может отображаться на экране планшета или смартфона. Вторая же версия предназначена для интеграции в робототехнический комплекс для решения задач навигации и картирования. Фото: Дмитрий Григорьев / ITMO.NEWS
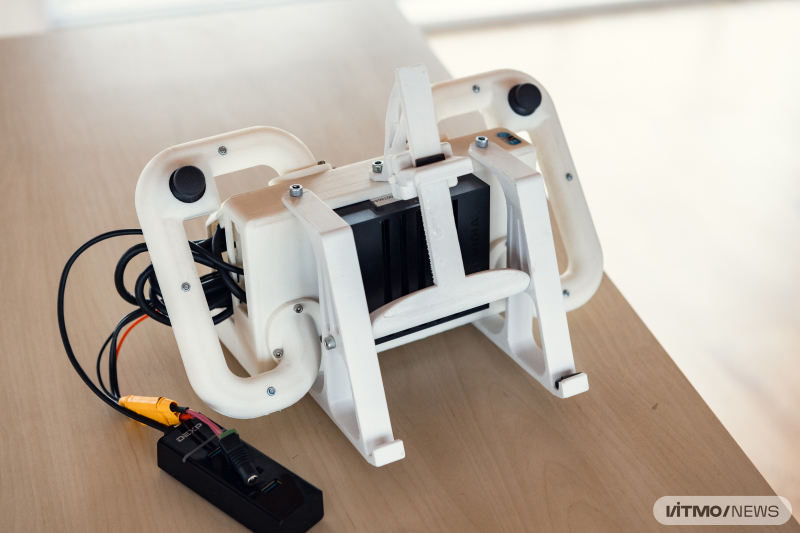
За счет разработки системы монокулярного зрения инженерам удалось уменьшить требования, которые предъявляются к аппаратному обеспечению. При этом разработчики старались сделать так, чтобы характеристики устройства не уступали тем, которые есть у разработок с классическими стереокамерами. В итоге получилось создать устройство, которое, с одной стороны, менее требовательно к железу, а с другой ― позволяет достичь той же точности, как и в классических подходах. Фото: Дмитрий Григорьев / ITMO.NEWS
Система может использоваться как самостоятельное решение для реконструкции помещений. Например, на построенное ею трехмерное изображение можно накладывать текстуры и таким образом воссоздавать помещения для систем виртуальной реальности ― а не рисовать их вручную. Во-вторых, разработка может использоваться в составе мобильных робототехнических комплексов для решения задач навигации и картирования помещения. Важно отметить, что эти разработки выполняла непосредственно команда наших магистрантов.
На следующем этапе мы будем думать, как наиболее эффективно интегрировать систему монокулярного зрения в тот или иной робототехнический комплекс ― это может быть как мобильный робот, так и робот-собака или квадрокоптер. Сделав это, мы планируем повысить автономность таких систем и, безусловно, добиться того, чтобы они могли выполнять некоторую полезную работу в непростых условиях.
Прочитайте также:
В ИТМО создали прыгающего робота на основе морфологических принципов проектирования
Зачем учить роботов видеть? Отвечаем на девять вопросов о компьютерном зрении
Мечтают ли робототехники о робособаках
Конечно, у всех на слуху роботы-собаки от Boston Dynamics. Прежде всего, важно понимать, что Boston Dynamics ― серьезная компания с доступом к крупным ресурсам и большой командой разработчиков. Это позволяет делать комплексные проекты. А создать робота-собаку ― задача, безусловно, очень сложная. Но нам тоже интересно это направление и более того, у нас уже есть существенные заделы. Наиболее сильные компетенции у нас в программной части, поэтому на первом этапе мы, скорее, сконцентрируем свои усилия именно на софте. Но не исключаю, что в будущем мы займемся и аппаратной частью.
Мне кажется, пытаться догонять, копировать то, что уже сделано за рубежом, бессмысленно. Поэтому сейчас мы стараемся найти точки, в которых сможем предложить инновационные, конкурентные решения. Сейчас у нас уже есть некоторые элементы робота-собаки, над которыми мы работаем, есть разработанные подходы к синтезу механических частей. При этом важно отметить, что это новые, наукоемкие решения.
На факультете систем управления и робототехники также работают над возможностью создания собственных роботов-собак. Фото: Дмитрий Григорьев / ITMO.NEWS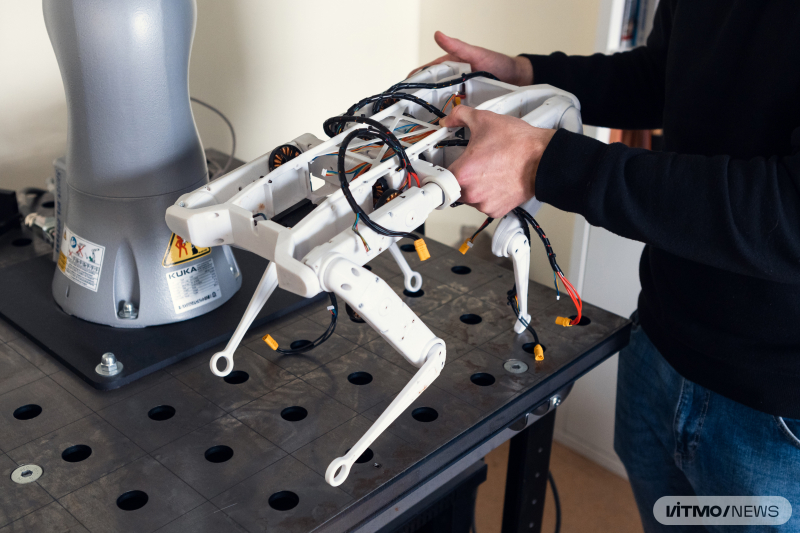
Как устроена лаборатория и зачем робототехникам свой бассейн
На факультете систем управления и робототехники ИТМО работают две лаборатории: «Геометрические методы управления и приложения» и «Биомехатроники и энергоэффективной робототехники». Они занимаются смежными направлениями, но со своей спецификой ― первая в большей степени ориентирована на «софт», то есть синтез математических алгоритмов управления и очувствления, а вторая ― на «железо», то есть синтез механизмов и разработку аппаратно-программных комплексов для роботов.
Лаборатории оснащены различным оборудованием. Например, у нас даже есть лаборатория с настоящим бассейном, в которой мы занимаемся развитием методов управления автономным движением роботизированных плавательных средств. Эта работа ведется в рамках проекта РНФ под руководством Антона Пыркина уже четвертый год. Я выступаю ответственным исполнителем и координирую работу наших аспирантов, участвующих в проекте.
Как вообще появилась такая лаборатория? В рамках своей диссертации я сотрудничал с коллегами из Норвегии, которые смогли построить у себя достаточно крупную лабораторию, связанную с апробацией систем динамического позиционирования. Во многом вдохновившись этим примером, мы создали похожие условия и у себя.
Такая установка позволяет исследователям испытать алгоритмы в физической среде. Это гораздо эффективнее, чем моделировать эксперименты на компьютере. В лаборатории воссоздали условия, которые присущи реальным водным судам. Это позволяет проверить наработки в условиях, приближенных к реальности, при этом, конечно, не ставя под угрозу настоящие катера. Так аспиранты учатся испытывать алгоритмы и пробовать новое. Видео: Дмитрий Григорьев / ITMO.NEWS
Если говорить о глобальных трендах, то сейчас, безусловно, есть задача повышать автономность различных беспилотных систем ― автомобилей, квадрокоптеров, роботов-доставщиков. В этом направлении движутся многие компании. Мы также отвечаем этим трендам и стараемся развивать ту область, которой мы занимаемся, в сторону большей автономности. Поэтому занимаемся не только синтезом алгоритмов управления, но и работаем над интеграцией систем искусственного интеллекта.
Для контекста: в некотором смысле есть два подхода: на основе динамических моделей и на основе данных. Есть методы теории систем управления, которые позволяют нам достигать математически формализованной цели гарантированным образом, но сама формализация цели может быть в определенном смысле несколько ограничена. С другой стороны, есть методы ИИ, основанные на данных, которые не гарантируют нам стопроцентного достижения цели, но зато позволяют решать задачи в плохо формализованных условиях. Наш вызов ― объединить эти два направления в единое решение, которое сочетает надежность и гарантированность, с одной стороны, а с другой ― универсальность и функциональность. Это сложная задача, но мы также над ней работаем.

Лаборатории на факультете систем управления и робототехники ИТМО. Фото: Дмитрий Григорьев / ITMO.NEWS

лаборатории на факультете систем управления и робототехники ИТМО. Фото: Дмитрий Григорьев / ITMO.NEWS

лаборатории на факультете систем управления и робототехники ИТМО. Фото: Дмитрий Григорьев / ITMO.NEWS
лаборатории на факультете систем управления и робототехники ИТМО. Фото: Дмитрий Григорьев / ITMO.NEWS
Какие возможности для развития PI есть в ИТМО
Лично по моему опыту, ИТМО дает все возможные ресурсы, чтобы человек рос как ученый в целом и как PI в частности. В первую очередь, я благодарен университету за коллектив ― те коллеги, с которыми я работаю, та научная школа, в которой я вырос, именно это и создает атмосферу и способствует научному развитию.
Во-вторых, это, конечно, инфраструктура. Университет предоставляет все помещения и оборудование.
И наконец, возможность выйти на международную арену. Университет обеспечивает контакты с учеными по всему миру, участие в научных конференциях, которые подпитывают и позволяют держать руку на пульсе и выполнять актуальные задачи. Что касается международного сотрудничества в последний год, могу сказать, что лично на себе я не ощутил каких-то драматических изменений ― например, буквально на днях у нас вышла статья в престижном журнале совместно с нашим коллегой из Италии. Конечно, я знаю, что многие сейчас переориентируются на восточные направления. Но если говорить про наш мегафакультет, то он задолго до 2022 года очень плотно работал с партнерами из Азии. Например, у нас уже давно успешно функционирует институт HDU-ITMO Joint Institute совместно с университетом HDU в городе Ханчжоу, Китай.
Добавим, что прямо сейчас в университете проходит конкурс «PI с командой». Он предназначен для сильных научных групп, которые ведут прорывные исследования. Победители конкурса получат грант до 30 млн рублей на развитие собственной лаборатории в ИТМО. Узнать подробности и подать заявку можно на сайте.



