«Федор» (FEDOR – Final Experimental Demonstration Object Research) – первый российский человекообразный робот. Его рост 180 см, вес около 160 кг, а мощность – 20 лошадиных сил. Робота создал Фонд перспективных исследований совместно с НПО «Андроидная техника» по заказу МЧС как робота-спасателя. Разработка основывается на базе предыдущих моделей робототехнических устройств, созданных НПО «Андроидная техника» по заказу Роскосмоса (модели SAR-400 и SAR-401).
Работа начали делать в 2014 году, и его разработка продолжается до сих пор. Впервые упоминания о «Федоре» появились в 2016 году, тогда же был представлен первый прототип. Главная сфера применения «Федора» – спасение жизней. Он сможет работать на местах с химическим и радиационным заражением, заниматься сортировкой радиоактивных отходов. За счет развитой моторики «рук» робот может помогать в производстве и медицине.
«Насколько концепция антропоморфного робота внутри космической станции оправдана, непонятно. В целом, когда есть прямой контакт с человеком, такой формат можно считать оправданным, потому что с точки зрения взаимодействия проще считываются намерения и действия робота, если он похож на человека анатомически. Если же отбросить аспект взаимодействия с человеком, если робот находится за пределами станции, то ему необязательно быть антропоморфным. Однако при этом можно использовать конструкции, аналогичные человеческому строению», – считает руководитель международной лаборатории «Биомехатроника и энергоэффективная робототехника» Университета ИТМО Сергей Колюбин.
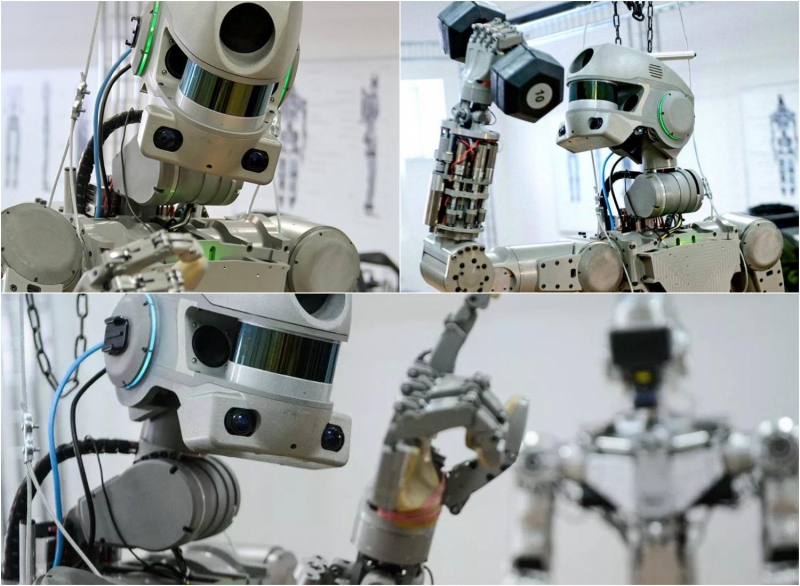
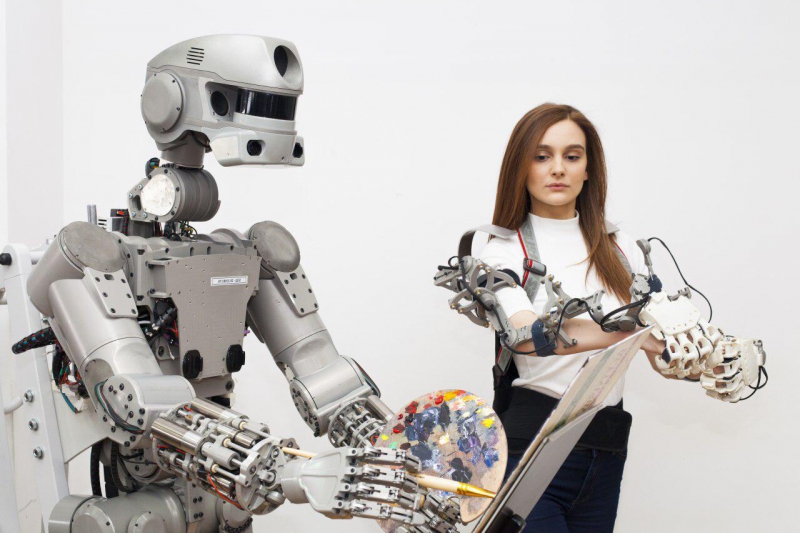
У робота есть несколько особенностей. Например, он стал первым роботом в мире, научившимся садиться на шпагат, также он научился стрелять из пистолета с двух рук (за это производитель лишился доступа к ряду зарубежных деталей, несмотря на то, что робот – не военная разработка). Федор умеет идентифицировать типовые объекты и инструменты и различает препятствия. Все это он сводит в трехмерную схему окружающей обстановки. Он также умеет открывать дверь, использовать дрель, водить автомобиль и квадроцикл в автономном режиме. Кроме того, робот способен работать в дублирующем режиме – оператор надевает экзоскелет, повторяющий структурные особенности «Федора», а робот копирует движения оператора.
Первые прототипы робота управлялись оператором. Сейчас «Федор» умеет двигаться автономно (это самообучающаяся система). С помощью разных датчиков (камер, тепловизора, микрофона, GPS, ГЛОНАСС, дальномерных лазеров и специальной системы для определения положения своего тела) робот получает информацию об окружающей среде. В будущем разработчики планируют наделить робота способностью самостоятельно определять задачу. Так, если робот увидит, что человек пострадал и ему нужна помощь, он самостоятельно поймет, что нужно сделать (например, перенести в безопасное место).
«Роботу нужно быть антропоморфным затем, что все на планете сделано под людей. Все, что касается цивилизации, условий, в которых мы живем и сервисов, которыми пользуемся сегодня. Для того, чтобы робот мог функционировать в тех же условиях, где функционирует человек, роботу лучше иметь форму и возможности человека. Можно под каждый конкретный космический корабль делать робота неантропоморфного, и, возможно, он сможет быть более функциональным, но он не будет универсальным. В данном случае антропоморфность – универсальный инструмент. Такой робот сможет работать и на отечественном, и на зарубежном оборудовании», — объяснил руководитель Лаборатории молодежной робототехники Университета ИТМО Игорь Лосицкий.

Робот состоит из 15 тысяч деталей и работает на операционной системе реального времени, разработанной в Санкт-Петербурге на базе Linux. Заряжается робот через розетку (работать в автономном режиме может час). Известно, что для одного из прототипов робота 50 % деталей изготавливались в России, остальные по спецзаказу в других странах, среди которых Швейцария, США, Япония, Германия и другие. Однако точной информации о процентном соотношении отечественных и иностранных компонентов для всех прототипов робота нет.
«С точки зрения компонентной базы в конечном счете важно не место производства деталей, а то, как они используются. Айфон мы считаем американским продуктом, при том что 99 % “железа” производится в Китае. Однако мы понимаем, что айфон — это больше программное обеспечение, а не материальное воплощение. Так же с роботами. Неважно, какие датчики и провода на каком конкретно заводе были изготовлены. Главное — это принципы работы, которые заложены в систему», – объяснил Сергей Колюбин.
Антропоморфный робот «Федор» отправится на МКС на корабле «Союз МС-14» 22 августа 2019 года. Перед полетом он получил новое имя – Skybot F-850. По словам СМИ, робот должен соответствовать обычным российским требованиям, чтобы полететь на МКС, у NASA не было к нему никаких дополнительных требований. Под руководством космонавта Александра Скворцова на российском сегменте МКС робот выполнит несколько задач, однако информация о том, какие это будут задачи, строго засекречена (о них станет известно после завершения миссии). Планируется, что робот вернется на Землю 7 сентября.

«В 2011 году я был участником проекта Robonaut, который реализовывали NASA и компания General Motors. Идея проекта была такая же – сделать робота, который сможет находиться внутри МКС и помогать космонавту в выполнении миссий, при этом он мог управляться удаленно или автономно. Недавно этого робота забрали с МКС, и большую часть времени он там находился или в запакованном варианте, или в сломанном состоянии. Ключевая проблема в том, что прямое физическое взаимодействие с людьми требует использования определенных методов управления движением робота. Оказывается, что при этом точность позиционирования робота не очень высокая. У человека такая же проблема: мы не очень точны с точки зрения позиционирования. Однако если речь идет о роботе, который находится в состоянии невесомости, то машина может совершать неконтролируемые движения. В своем проекте мы использовали руки-ноги, которыми робот мог цепляться за что-либо в пространстве, и руки, которыми он работал, – в роботе “Федор” сегодня используется такой же метод. В целом, подход не новый, и хочется верить, что организаторы учли ошибки проекта Robonaut, который был в итоге закрыт», — прокомментировал Сергей Колюбин.
В будущем «Федор» может стать первым испытателем нового российского пилотируемого корабля «Федерация», первый запуск которого запланирован на 2022 год, он будет совершаться ракетой-носителем «Союз-5» («Иртыш») с космодрома «Байконур». Также не исключено, что впоследствии робот сможет отправиться на «Федерации» в облет Луны. К апрелю 2019 года было известно, что разработчики потратили около 300 млн рублей на реализацию проекта, однако работа над проектом все еще продолжается.
«У робототехники в космосе большие перспективы. Есть проекты, в которых роботы работают за пределами космической станции, они действительно выполняют полезную нагрузку. У робототехники понятная история с так называемым 4D приложением (замена роботами дорогостоящего ручного труда в грязных, скучных, отдаленных или опасных средах (4D – dirty, dull, distant or dangerous environments). Космос как раз является и удаленной средой, и опасной, поэтому для роботов работы здесь много. Я вижу больше перспектив для роботов за пределами МКС – там, где человеку сложнее находиться. Каждый выход в открытый космос это существенный нагрузки», — заключил Сергей Колюбин.