Tried and tested (and free)
Biomimetics is the method by which scientists borrow successful ideas from nature to use in their own inventions. The advantage of this approach is that the solutions found among animals and plants are not subject to any patent. And over countless millennia, there are certain structures and mechanisms in nature that have allowed all sorts of living things to survive in various conditions. Thus, developers can rely on nature’s best ideas, modify them as needed, and create robots that resemble beings we’re already familiar with.
“For instance, there’s a German company named Festo that specializes in various biomimetic solutions. They have a kangaroo robot that, just like the real thing, conserves energy after a jump and uses it for the next one. There are other notable inventions: the well-known Spot robot-dogs, worm-like medical robots, or even drug delivery bots modeled after fish. Some specialists develop mechanisms based on plant life – plantoids. But that’s still a work in progress and it’ll be some time before you can buy one in a store,” explains Pavel Kovalenko, an associate professor at the Faculty of Control Systems and Robotics.

Pavel Kovalenko. Photo by Dmitry Grigoryev, ITMO.NEWS
More ground to cover
Nevertheless, the biomimetic method suffers from several limitations. Firstly, scientists have not been successful in recreating the principles or developing materials that would allow them to fully replicate certain species. Take geckos: these lizards’ paws are covered with microscopic adhesive hairs that can stick to any smooth vertical surface and traverse it. But researchers are yet to create a similar technology that would be suitable for industrial production.
“When we try to create the same product using nanolithography, the hairs come out different: not splayed like they should be, but rather conical or simply crudely shaped. Because of this, the adhesion is not adequate. In addition, artificial materials cannot self-clean and, therefore, lose their stickiness. It’s like a piece of duct tape that you apply and tear off again and again,” says Pavel Kovalenko.
The second limitation of biomimetics is the scalability of natural mechanisms: as a rule, the ideas used at nanoscale are not always reproducible in macroscale. This forces researchers to look for other solutions to applied problems. For instance, instead of a robotic gecko, they will also create a snail that can climb vertical surfaces.
Last but not least, for robots to function as animals, researchers have to truly synchronize their control system, its components, and parts of the robot. According to Pavel Kovalenko, this can be achieved when both the software and the engineering aspects of the robot are developed by a single team with a clear view of their final outcome.
Read also:
ITMO Student Designs an Active Exoskeleton to Lift Weight
ITMO Scientists Create a Hopping Robot Using Morphological Computation
A robotic zoo at ITMO
Despite all these challenges, students and graduates of ITMO’s Faculty of Control Systems and Robotics are actively engaged in biomimetics, having already completed several stages of their research. First, they analyzed the behavior, body structure and functions of living organisms, and then based on this step decided which body parts they should recreate in their work. They have also selected flexible materials resembling existing animals. At the next stage, the researchers performed calculations, chose the digital components and motors for the robot, and developed the necessary software. As a result, they have already created several model robotic animals.
For instance, ITMO graduate Georgy Larionenko developed a waterproof robotic fish with a moving tail that works on two magnets. A servomotor inside the waterproof body activates the first magnet, which in its turn activates the second one that is connected to the fluke. This way, by moving its tail in the water, the robotic fish can swim – both in fresh and salty water, as experiments have shown. The robot can be useful for gauging the parameters of the water and the ocean floor in various conditions, including in the arctic region.
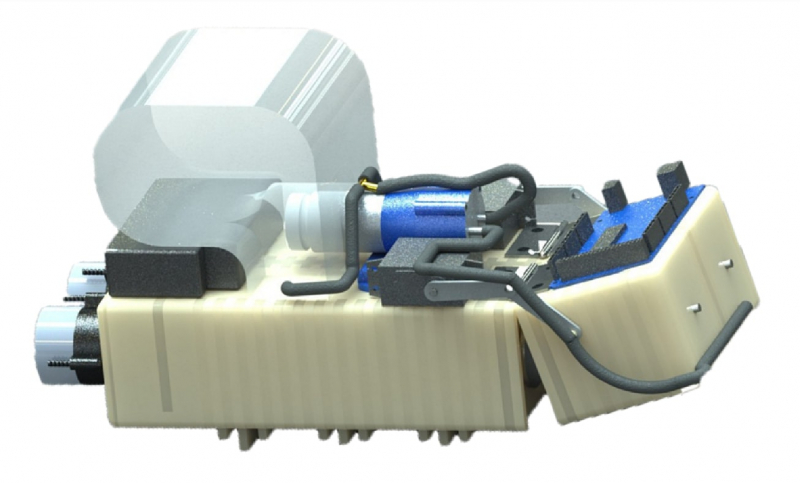
A team of three graduates, Oksana Shuraeva, Anastasia Yusupova, and Anton Kovalenko, has developed a robotic snail. It can crawl down inclined surfaces by intermittently extending and retracting its “paws,” two spirals with plates attached to them. In order to guide the robot in the necessary direction, a servomotor, located in its shell, positions the snail’s head at the needed angle, so that the rest of its body can follow suit. One application of this invention is window cleaning – the snail will leave a trail of detergent behind.
Elizaveta Shelukhina, another ITMO graduate, wanted to make a device that will be protected from its environment. She could take inspiration from several animals, including turtles, hedgehogs, and armadillos, but eventually decided to settle on the latter, creating the concept for robotic armadillo. When the robot senses that something is falling on it or if someone kicks it, it rolls into a ball to protect its silicon insides. When the external influence ends, the robot unrolls back into its full length. Such robotic armadillos can come in handy in rescue missions, when there is a high risk of buildings collapsing.
Robotic snail. Image courtesy of the Faculty of Control Systems and Robotics
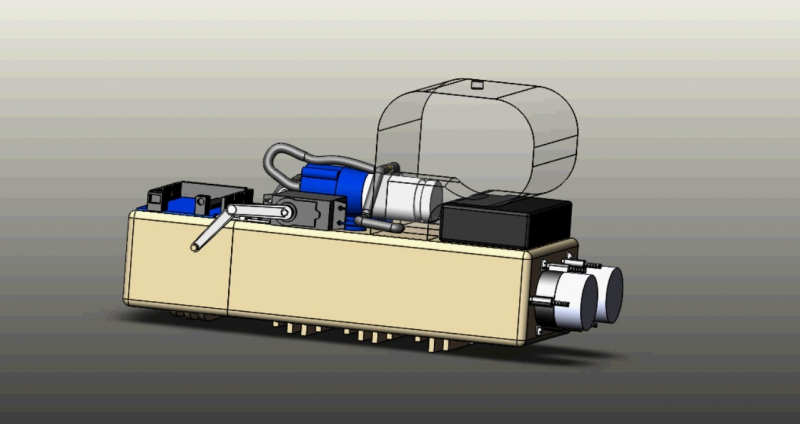
The snail’s locomotion mechanism includes two spirals with plates attached to them. The spirals are activated by two D41AB12 DC motors and when climbing an inclined surface the snail’s front part is controlled by an FS5106B servomotor. Image courtesy of the Faculty of Control Systems and Robotics

The concept of a protected armadillo robot developed by Elizaveta Shelukhina. When hit by something, the robot rolls into a ball to protect its insides. Photo by Dmitry Grigoryev, ITMO.NEWS

The robotic fish presented at the Robotex youth robotics contect. Image courtesy of the Faculty of Control Systems and Robotics
These days, students at the faculty are also developing various robotic animals. For example, Maged Mohamed, a second-year student in the Robotics and Artificial Intelligence Master’s program, researches biomimetics to come up with his own prototype of a waterproof fish that will also resist the pressure deep underwater to collect samples of the bottom and water for analysis.