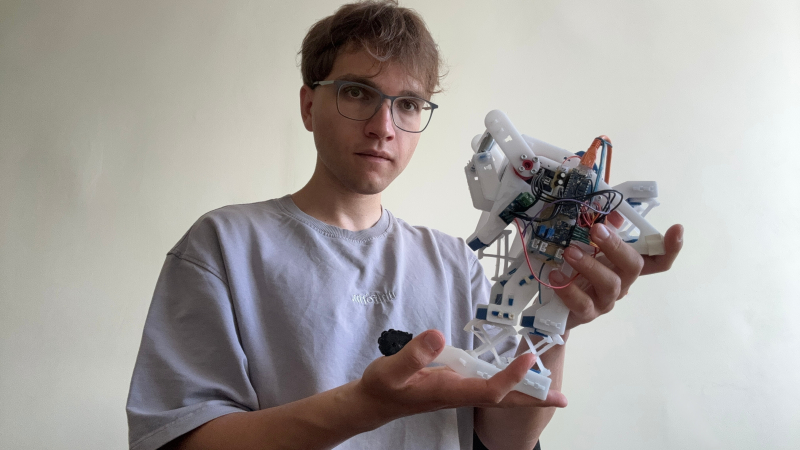
Робототехники из Центра сильного ИИ в промышленности ИТМО разработали метод, который оптимизирует механическую конструкцию робота, траекторию его движения для обеспечения требуемого динамического поведения. Чтобы проверить метод, аспирант ИТМО Егор Ракшин создал робота с гибкими сочленениями. Улучшенный механизм способен переносить динамические ударные нагрузки и работать в условиях недостатка информации об окружающей среде.
Для этого ученые использовали предыдущую версию робота, разработанного под руководством профессора факультета систем управления и робототехники Ивана Борисова. За подвижность в прежней версии робота отвечают подшипники — из-за этого конструкция более жесткая и менее подвижная, а при падении часть энергии удара рассеивается на пластическую деформацию твердых звеньев.
В новой версии авторы заменили вращательные кинематические пары с подшипниками на гибкие сочленения — они работают как пассивная подвеска, которая при падении робота берет весь удар на себя и защищает редукторы приводов и жесткие звенья от деформации. Кроме этого, новая конструкция позволяет рекуперировать, то есть возвращать часть рассеянной при соударении энергии, а также смягчать пиковые ударные нагрузки на приводы — потенциально это снизит требования к комплектующим робота и повысит его энергоэффективность.
Прототип робота. Ученые оптимизировали механизм робота с помощью генетических алгоритмов глобальной оптимизации, напечатали и вырезали детали при помощи технологии 3D-печати и лазерной резки, собрали прототип и протестировали его с использованием технологии захвата движения для сравнения поведения реального робота с его имитационной моделью. Фото предоставлено учеными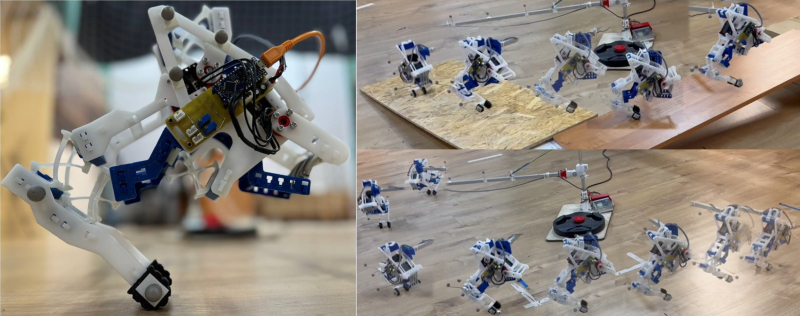
Чтобы проверить, как механизм абсорбирует ударные нагрузки, ученые сбрасывали робота с метровой высоты, кидали в него футбольный мяч. Нагрузки не принесли ему вреда: при падении робот «отпружинивал» от пола и продолжал двигаться без повреждений.
«Наш робот хорошо переносит шоковые ударные нагрузки и может работать в неструктурированном окружении — то есть на неизвестной поверхности, вслепую. За счет гибких сочленений конструкция может перемещаться по неровностям без сложной системы обратной связи. Метод проектирования роботов с эластичными сочленениями позволит повысить ресурс шагающих и манипуляционных роботов, работа которых сопряжена с контактным взаимодействием с окружением. Сейчас механизм представляет собой прототип одной ноги — из нескольких таких можно собрать четырехногого робота (например, робота-гепарда), который способен перемещаться на бóльшие расстояния благодаря рекуперации энергии», — рассказал первый автор статьи, аспирант и инженер лаборатории «Биомехатроники и энергоэффективной робототехники» Егор Ракшин.
Прототип робота. Фото предоставлено учеными
В будущем исследователи планируют применить метод для создания новых роботов (квадропедов, бипедов, роботов гибридной локомоции), в том числе для решения задач по логистике и инспекции в народном хозяйстве.
Доклад «Параметрический синтез гибких сочленений в составе ударно-устойчивой галопирующей ноги мобильного робота» (Parametric Synthesis of Compliant Joints for Impact-Robust Shaftless Leg Mechanisms) будет впервые представлен на IROS 2024, одной из крупнейших международных конференций по робототехнике, которая проводится с 1988 года.
На конференции представят 1587 докладов со всего мира, в том числе три публикации от факультета систем управления и робототехники ИТМО — это увеличивает общее число принятых работ на эту конференцию до 12 публикаций (2016, 2019, 2021, 2023, 2024).
IROS входит в рейтинг конференций CORE и причисляется им к уровню A (один из самых престижных). В этом году мероприятие пройдет в Абу-Даби с 14 по 18 октября. Цель события — познакомить международное сообщество исследователей робототехники с передовыми достижениями науки и техники в области интеллектуальных роботов и интеллектуальных машин за прошедший год.



