
Profile
Specialization: mathematical control algorithms for complex robotic systems.
Team: 20+ people.
Projects: as part of Embodied AI Technologies in Robotics, Oleg Borisov and his team are developing monocular vision software that can reconstruct 3D scenes using a single camera. He’s also creating algorithms to manage a range of robotic systems, including compact robotic watercraft.
School and career path
I went to school in Znamensk. It is a small, closed town in Astrakhan Oblast, not far from Volgograd. My favorite subjects were physics, mathematics, and computer science. I was good at them, so I knew right away that I’d go to a technical university. Moreover, my family and I heard great things about ITMO and I dreamed of getting in. Though I settled on the university, it wasn’t as easy with the major.
When I went to ITMO’s open day, I was determined to get my head around a major, but all these specializations consisting of similar words left me even more puzzled. Nevertheless, I was most fascinated by computer technologies and control. My first choice was IT security (the School of Computer Technologies and Control - Ed.) but I ended up opting to study at what is now the Faculty of Control Systems and Robotics, even though I hadn’t known much about the fields it pursued. Anyway, I have no regrets. Throughout my career, I’ve never switched fields but rather continued to develop within my specialization.
I got my Bachelor’s, Master’s, and PhD from ITMO and I was lucky that my studies and research went hand in hand finely. I was an engineer, then I worked as an assistant, and, once I got my PhD, I became a principal investigator (PI) and ever since, I've been supervising Master’s and PhD students. At the moment, I’m working with five PhD students.
I moved forward in my career quite naturally. Collaboration is an integral part of research: take scientific communities or conferences, for instance. One way or another, a researcher’s work comes down to interacting with colleagues and instructing students. When I studied, I kept hearing that collaboration is the cornerstone of research. Back then, I didn’t understand why a Master’s student like me should not only care about personal achievements but also look for potential team members and students. But that’s indeed the approach to follow. Collaborative research brings greater results.
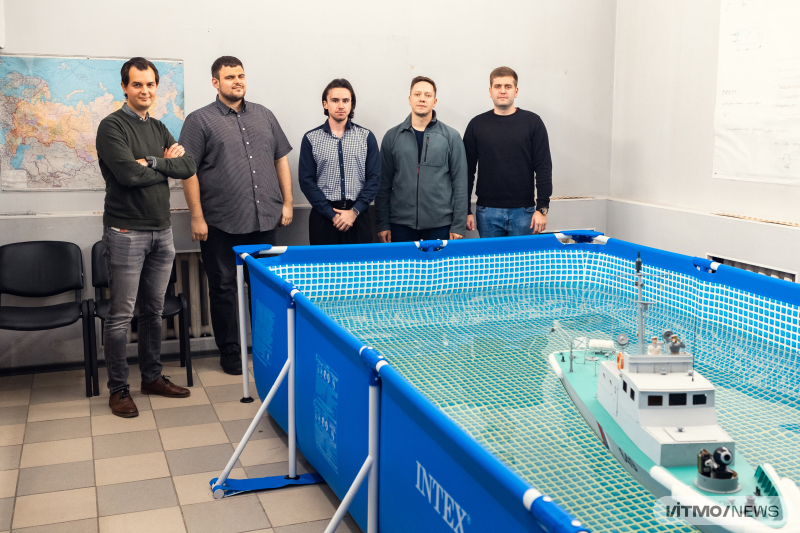
Oleg Borisov and his team. Photo by Dmitry Grigoryev / ITMO.NEWS
Simple algorithms for complex systems
As a PhD student, I took part in several projects. My first “software” project focused on the creation of a mathematical algorithm that let robots gather information sensor-free, whereas my first hardware was all about grippers.
Sensorless control means that researchers turn to assessment, rather than physical measurements, to make robots perform tasks that have so far required sensors, thus creating an analog to an expensive and cumbersome tool. In the case of, say, manipulators, we did our best to create an algorithm that would let us effectively evaluate a robot’s interactions with the environment without using a force torque sensor.
As a result, we successfully completed the task, presented the software to our industrial customer, and even received an international patent. The second project resulted in several blueprints that we handed over to the customer, as well. What we discovered in that time helped us a lot with other devices, such as galloping robots, and, most importantly, the project paired me with my now-teammates.
A prototype of an energy-efficient galloping robot developed at ITMO’s Faculty of Control Systems and Robotics. Video by Ekaterina Shevyreva / ITMO.NEWS
We deal with both fundamental and applied tasks. For instance, as part of a presidential grant, Andrey Zhivickiy and I are working on motion control algorithms for robotic systems. We’re investigating the synthesis of nonlinear objects with uncertainties in order to afterwards incorporate it into various applications of robotics.
Our other grand project called Embodied AI Technologies in Robotics is implemented within the university’s 2030 Development Strategy and focuses on the development of software and hardware solutions. The project involves a large group of scientists and its applied aspect is coordinated by Sergey Kolyubin.
The project will go on for three years. This July, we already presented our first results, namely a monocular vision reconstructor, which is, on the one hand, a hardware solution and, on the other – a programming project meant to lower hardware requirements. Here’s how: smart algorithms allow the system to produce a 3D map using a single camera rather than three.

The prototype exists in two versions: the first is a compact device that can be used to create 3D maps and syncs with smartphones and tablets. The second one can be integrated into robotic systems to solve navigation and mapping problems. Photo by Dmitry Grigoryev / ITMO.NEWS
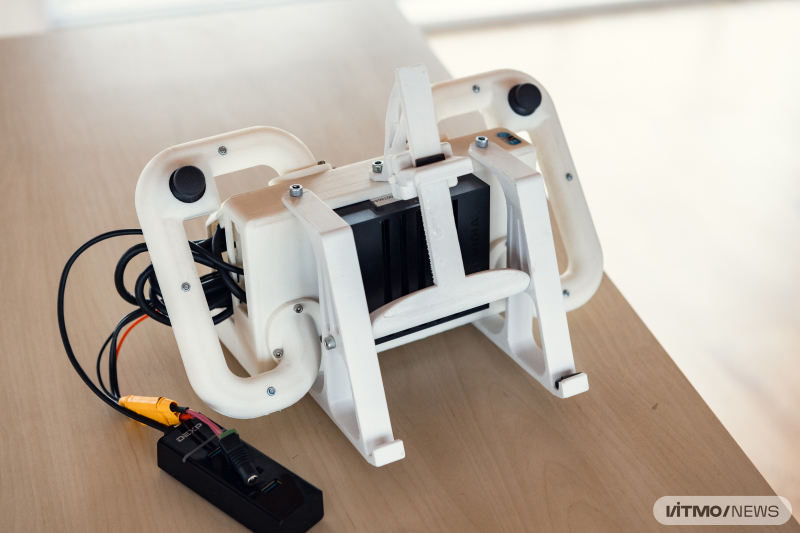
With their monocular vision system, the engineers managed to reduce hardware requirements while keeping the quality level on par with stereo camera-based systems. Photo by Dmitry Grigoryev / ITMO.NEWS
The tool can work as both a standalone solution – for instance, you can add textures to the resulting 3D scan and thus digitally recreate locations for VR systems – or as a way for small-scale robotic systems to solve navigational and mapping problems. It’s worth noting that our Master’s students were actively engaged in developing this system.
At the next stage, we’ll need to ascertain how to best integrate the solution into robotic systems, be it mobile robots, robot dogs, or drones. As soon as we succeed at that, we’re planning to increase their autonomy and train them to perform tasks in challenging conditions.
Read also:
ITMO Scientists Create a Hopping Robot Using Morphological Computation
Why Teach Robots How to See? Nine Burning Questions About Computer Vision
Robot dogs
Boston Dynamics' robot dogs are, no doubt, familiar to everyone.. But keep in mind that they are an upscale company backed with numerous resources and a large development team, allowing them to produce such complex projects. We, in turn, share their interest in this field and can even boast some significant results. Having done a good job at coding such robots, we decided to focus mainly on the software during the first stage of our project, but we don’t rule out taking on the hardware later on, too.
I believe that it’s pointless to catch up to and copy others. We’re eager to produce our own innovative and competitive solutions. At the moment, we’re working on some elements of robot dogs and have worked out multiple methods of synthesizing their components.
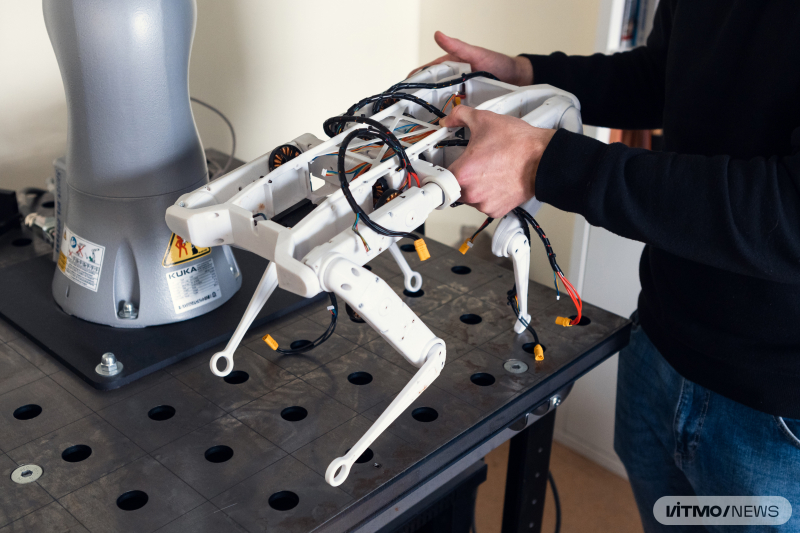
The development of robot dogs at ITMO’s Faculty of Control Systems and Robotics. Photo by Dmitry Grigoryev / ITMO.NEWS
Inside the laboratories
There are two laboratories at ITMO’s Faculty of Control Systems and Robotics. Both the Laboratory of Geometrical Methods in Control and Application and the Laboratory of Biomechatronics and Energy-Efficient Robots are involved in similar studies yet scientists from the former are more focused on software (the fusion of mathematical control and sensing algorithms), while those from the latter – on hardware (the synthesis of mechanisms and the design of software and hardware for robots).
The laboratories are well-equipped. For instance, we have a laboratory with a pool where we develop control methods for robotic watercraft. We’ve been working on this project for four years under the guidance of Anton Pyrkin. My task is to curate the research and coordinate the PhD students involved.
When establishing the laboratory, I took inspiration from our colleagues from Norway who have opened a large laboratory to test positioning systems.
This set-up allows researchers to test algorithms in the physical environment, which is far more efficient that computer modeling. The conditions here are identical to those of real water bodies, making it possible to test prototypes in realistic conditions without putting real boats in danger. Here, PhD students can test their algorithms and experiment. Video by Dmitry Grigoryev / ITMO.NEWS
One of today’s global trends is an increase in the autonomy of cars, drones, delivery robots, and the like. Like many companies, we are trying to bring greater autonomy to our field, too, not only by producing control algorithms but also by integrating AI systems.
Generally speaking, there are two approaches: the first one is based on dynamic models, while the other is data-oriented. On the one hand, we have methods that are 100% efficient in achieving mathematical objectives but don’t give us much freedom in formulating the goals, while on the other – we have data-based AI methods that, although not entirely bulletproof, can help us solve tasks in uncertain conditions. Our task is to figure out how to turn them both into a single solution: reliable, efficient, and multi-functional. This is a challenge we’re taking on.

Laboratories at the Faculty of Control Systems and Robotics. Photo by Dmitry Grigoryev / ITMO.NEWS

Laboratories at the Faculty of Control Systems and Robotics. Photo by Dmitry Grigoryev / ITMO.NEWS

Laboratories at the Faculty of Control Systems and Robotics. Photo by Dmitry Grigoryev / ITMO.NEWS
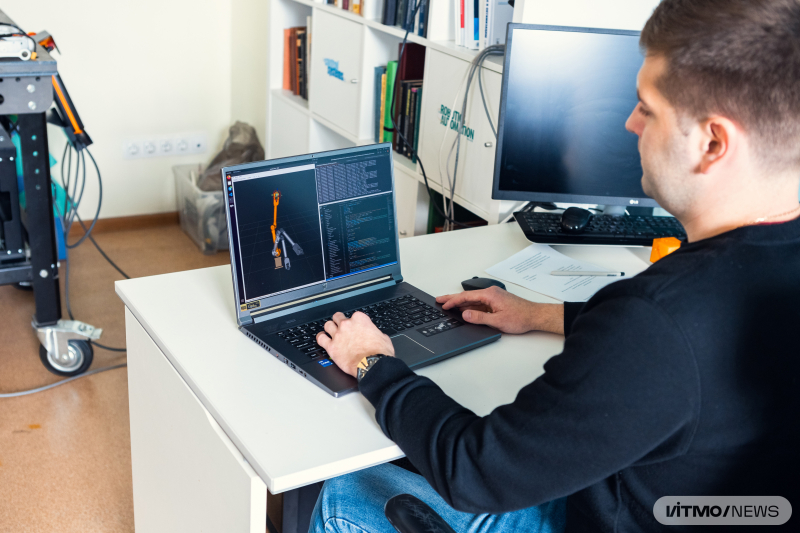
Laboratories at the Faculty of Control Systems and Robotics. Photo by Dmitry Grigoryev / ITMO.NEWS
PIs at ITMO
As I see it, ITMO offers a wide range of opportunities for scientists in general and PIs in particular. I’m most grateful for the people I get to work with. The university has a special atmosphere that stimulates you to grow professionally. Moreover, the university gives a high priority to research infrastructure. And finally, ITMO researchers have the chance to expand their network and participate in a wide range of conferences, letting them keep their finger on the pulse of industry trends and new research. With everything going on, international cooperation hasn't gone away. Just recently, a joint article with our Italian colleagues was published in a prestigious journal. Today, Russian universities are trying to expand their cooperation with Eastern countries. Our faculty has been closely working with our Asian partners since long before 2022 and we even have a joint institute called HDU-ITMO Joint Institute with Hangzhou Dianzi University (HDU), Hangzhou, China.
Note! ITMO’s running a competition for breakthrough research teams wishing to launch their own laboratories at the university. The winners will receive a grant of up to 30 million rubles. Click here to learn more.




