Бесплатные и проверенные временем технологии
Биомиметика — это метод создания материалов и устройств, при котором ученые находят удачные идеи в природе и заимствуют их для своих разработок. Преимущество такого подхода в том, что решения, которыми пользуется животный и растительный мир, как правило, никем не запатентованы, поэтому они бесплатны для исследователей. К тому же за многолетнюю историю эволюции в природе закрепились определенные структуры и механизмы, которые помогают существам выживать в разных условиях. Поэтому ученые могут ориентироваться на самые эффективные решения природы, видоизменять их под задачи проектирования и создавать разных роботов, похожих на представителей окружающего мира.
«Например, немецкая компания Festo специализируется на разных биомиметических решениях. У них есть робот-кенгуру, который, как настоящее животное, при приземлении запасает энергию и использует ее для следующего прыжка. Также существуют и другие устройства — известные роботы-собаки Spot, роботы-черви для медицинских операций или микророботы-рыбы для доставки лекарств внутри человека. К тому же специалисты разрабатывают механизмы, основанные на принципах жизнедеятельности растений, — плантоиды. Но ученые пока проводят исследования и проектируют всех этих роботов. Пройдет некоторое время, прежде чем мы сможем купить их в магазине», — объясняет доцент факультета систем управления и робототехники Павел Коваленко.
Павел Коваленко. Фото: Дмитрий Григорьев / ITMO.NEWS
Чего не хватает биомиметике
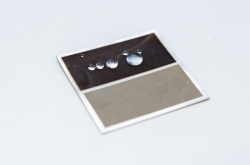
Тем не менее у биомиметического подхода есть несколько ограничений. Во-первых, ученым пока не удалось создать технологии и разработать материалы, нужные для повторения механизма определенных животных. Например, микроскопические щетинки на лапках геккона вызывают адгезию, за счет которых он может прилипать к любым вертикальным гладким поверхностям и ползать по ним. Но у исследователей пока не получилось воссоздать материал с микрощетинками, как у ящерицы, чтобы использовать его в промышленных масштабах.
«Когда ученые пробуют создать такой же материал с помощью нанолитографии, волоски получаются другими — не разветвленными, как у животного, а топорными и конусообразными. Поэтому на них не возникает эффективная адгезия. Вдобавок искусственные материалы не могут самоочищаться и в результате при передвижении робота перестают быть липкими. Это похоже на скотч, который вы несколько раз наклеиваете и снимаете с поверхности», — рассказывает Павел Коваленко.
Второе ограничение биомиметики — масштабируемость природных механизмов. Как правило, идеи, которые используются в наномире, не всегда возможно перенести в макромир. Поэтому ученым приходится искать другие варианты для решения прикладных задач. Например, робота-геккона может заменить робот-улитка, которая также способна ползать по вертикальным поверхностям.
Наконец, чтобы роботы действительно вели себя, как животные, нужно наладить синергию между эффективной системой управления и ее компонентами и самой конструкцией. По мнению Павла Коваленко, это возможно сделать, если программное обеспечение и приводная механическая часть создается вместе одной командой специалистов, которая видит, каким должен быть конечный результат работы.
Прочитайте также:
Студент ИТМО разработал активный экзоскелет, в котором можно без труда поднять до 80 килограммов
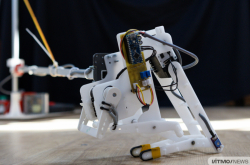
В ИТМО создали прыгающего робота на основе морфологических принципов проектирования
Робозоопарк в университете
Несмотря на эти трудности, студенты и выпускники факультета систем управления и робототехники ИТМО активно работают в области биомиметики. Чтобы создать животноподобных роботов, они уже прошли несколько этапов исследования. Сначала робототехники проанализировали поведение живых организмов, структуру и функции тела. Затем определили, какие части тела нужно воссоздать при разработке, а какие можно пропустить, и подобрали упругие и гибкие материалы, напоминающие настоящих животных. Следующий этап — проведение расчетов, выбор электронных компонентов и приводов для движения робота и написание программного обеспечения. В результате они уже создали несколько моделей роботов-животных.
Например, выпускник Георгий Ларионенко разработал герметичного робота-рыбу с двигающимся хвостом. Механизм работает с помощью двух магнитов. Серводвигатель приводит в действие первый магнит внутри водонепроницаемого корпуса, а тот, в свою очередь, влияет на второй магнит, прикрепленный к хвостовому плавнику. Виляя хвостом в разные стороны, рыба передвигается в воде. Эксперименты показали, что она хорошо плавает как в пресной воде в ванной, так и в соленой морской воде. Робота можно использовать для исследований параметров воды и дна океана, в том числе в арктическом регионе.
А команда из трех выпускников — Оксаны Шураевой, Анастасии Юсуповой и Антона Коваленко ― создала робота-улитку, который может ползать по любым наклонным поверхностям. В его корпусе спрятаны две спирали с нанизанным на них набором пластин. Они играют роль лапок, попеременно втягиваясь и вытягиваясь из тела улитки при движении. Чтобы задать роботу нужное направление, сервомотор, расположенный на месте раковины, поднимает переднюю часть робота (голову улитки) под нужным углом, а оставшаяся часть механизма (тело) движется вслед за ней. Одним из способов применения улитки может стать чистка окон: во время движения животное будет оставлять после себя моющее средство.
Выпускница Елизавета Шелухина придумала сделать устройство, защищенное от внешнего воздействия. На эту роль подходили сразу несколько животных — черепаха с панцирем, еж с иголками и броненосец, который с помощью роговых пластин создает вокруг себя непробиваемый панцирь и закрывается в нем. Последняя задумка оказалась наиболее подходящей, и так появился концепт робота-броненосца. Если он чувствует, что на него что-то падает или кто-то пинает его, он сворачивается в клубок и тем самым защищает свои внутренние электронные компоненты. Когда внешнее воздействие прекращается, он разворачивается обратно. Такой робот может пригодиться при поисково-спасательных операциях, когда есть большой шанс обрушения конструкции здания.
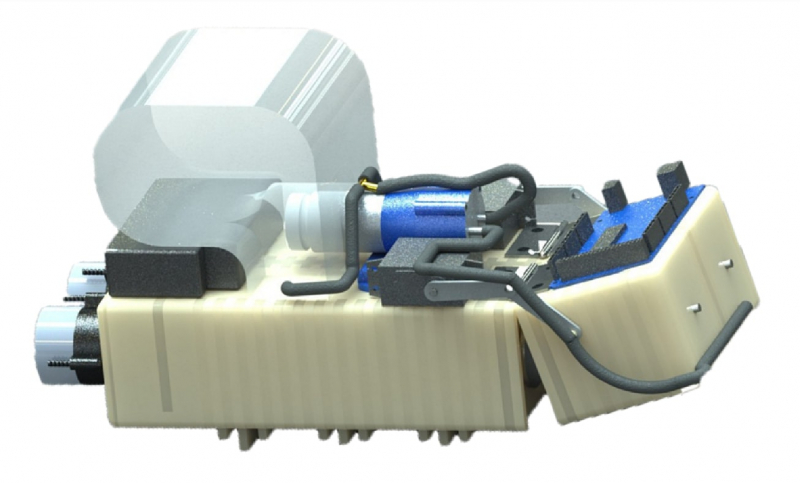
Робот-улитка. Изображение предоставлено факультетом систем управления и робототехники
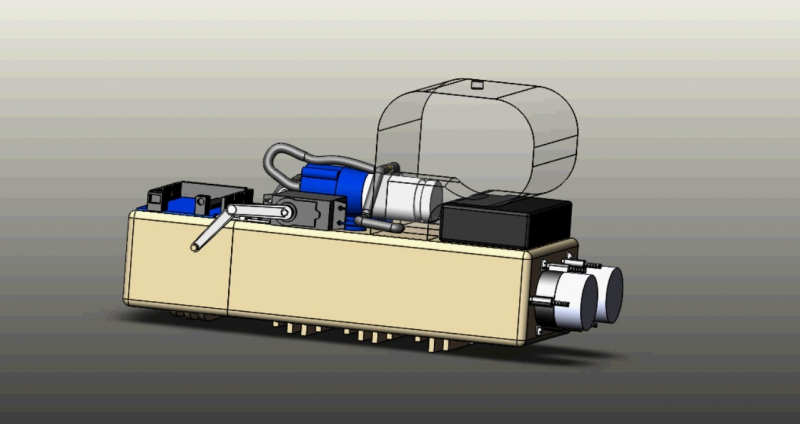
Схематическое изображение робота-улитки. Механизм локомоции состоит из двух спиралей с наборами пластин. Спирали приводятся в движение двумя двигателями постоянного тока D41AB12. Сервомотор FS5106B используется для поднятия передней части улитки при подъеме на гору. Изображение предоставлено факультетом систем управления и робототехники

Концепт самозащищающегося робота-броненосца, разработанного Елизаветой Шелухиной. По задумке, будучи атакованным, робот меняет свою форму на шаровую, защищая свою электронику и исполнительные механизмы. Фото: Дмитрий Григорьев / ITMO.NEWS

Презентация робота-рыбы на научно-техническом конкурсе для молодых робототехников Robotex. Фото предоставлено факультетом систем управления и робототехники
Сейчас на факультете систем управления и робототехники студенты продолжают разрабатывать робоживотных. Например, студент второго курса магистерской программы «Робототехника и искусственный интеллект» Магед Мохамед Альяане изучает принципы биомиметики, чтобы создать свой прототип герметичной рыбы. Она также будет способна противостоять давлению на глубине и собирать пробы дна и воды для анализа.