Почему создавать мобильных и при этом энергоэффективных роботов непросто
Индустриальные роботы должны обеспечивать высокую точность и скорость движения. Чтобы достичь этих характеристик, специалисты используют мощные электроприводы, которые потребляют много энергии. Поэтому такие конструкции, как правило, необходимо запитывать от электросети ― а это значит, что и робот в таком случае может быть только стационарным.
С мобильными роботами всё иначе. Они не могут постоянно запитываться от розетки, поэтому инженерам нужно конструировать их таким образом, чтобы они могли эффективно использовать энергию от батареи с ограниченным зарядом. Дело в том, что чем мощнее батарея, тем она тяжелее. И чтобы перевозить ее, робот должен потратить больше энергии, а значит, увеличивать емкость батареи будет невыгодно. Поэтому ученым приходится делать конструкцию, которая будет по максимуму использовать естественную динамику механизма и требовать меньше энергии.
Как решают эту проблему
Для этого роботехники используют принцип морфологического проектирования. Он заключается в том, чтобы большую часть требуемой динамики для движения робота обеспечивать с помощью его физического исполнения: распределения массы, эластичности, механических связей. В таком случае система управления не целиком регулирует движения робота, а лишь поддерживает и корректирует уже существующую его естественную динамику.
Чтобы воплотить этот принцип, процесс проектирования роботов нужно формализовать. Для этого важно учитывать не только алгоритмы управления, но и проектирование механики робота. По словам инженера исследовательского центра ИТМО в сфере ИИ «Сильный искусственный интеллект в промышленности» Ивана Борисова, долгое время специалисты разрабатывали новые алгоритмы управления, а в качестве «железа» использовали те же комплектующие элементы и принципы, что и для индустриальных роботов.
Однако успех робота Cassie продемонстрировал, что для достижения высокой скорости, запаса хода и способности перемещаться в неструктурированной среде нужно пересмотреть саму парадигму конструирования. Ведь для роботов, которые контактируют со средой, важнее не точность, скорость и грузоподъемность, а адаптивность и энергоэффективность.
Что придумали в ИТМО
Ученые ИТМО использовали принципы морфологического проектирования и предложили собственный метод для создания механизмов для манипуляционных, локомоционных и носимых роботов. В его основе — трехэтапный алгоритм проектирования устройств.
Первый этап решает задачу открытой кинематики, то есть описывает, из скольких последовательных звеньев должен состоять механизм, какой длины должны быть его звенья, какую траекторию с их помощью нужно выстроить, чтобы добиться желаемого поведения и производительности.
Второй этап включает замыкание цепочки звеньев, из которых состоит механизм, то есть превращает открытую кинематику в замкнутую (когда каждое звено имеет больше двух присоединений и цепочка получается замкнутой). Алгоритм замыкания описывает, какие звенья нужно присоединить к исходному механизму, чтобы перенести приводы в иное сочленение, либо убрать лишние, а также добавить новые механические связи. В результате можно получить механизм с меньшей инерцией, либо вовсе избавиться от лишних приводов. Это позволит сэкономить энергию и увеличить скорость движения робота.
Третий этап описывает, куда нужно установить приводы, чтобы максимизировать их эффективность. Также на этом этапе в механизм интегрируют физические и виртуальные эластичные элементы, которые помогают роботу адаптироваться к окружающей среде, амортизировать неровности на поверхности, а также возвращать потраченную энергию.
Каждый параметр конструкции рассматривается с точки зрения повышения производительности и максимальной функциональности, поэтому такой подход позволяет создавать более эффективные устройства, отмечают авторы.
Иван Борисов. Фото: Дмитрий Григорьев / ITMO.NEWS
«С помощью нашего метода можно разработать любой рычажный механизм: механизм ноги для шагающего робота, механизм пальца для захватного устройства, элементы экзокостюма и другое. Кроме того, подход позволяет создавать роботов, которые могут функционировать в условиях неструктурированной и неизвестной среды. Например, шагающего робота, который даже в условиях плохой освещенности и неполноты данных сможет передвигаться вслепую, или антропоморфную кисть, которой можно хватать объекты наощупь», — рассказал инженер исследовательского центра ИТМО в сфере ИИ «Сильный искусственный интеллект в промышленности», участник проекта Иван Борисов.
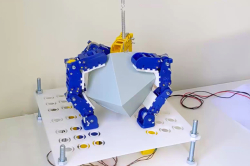
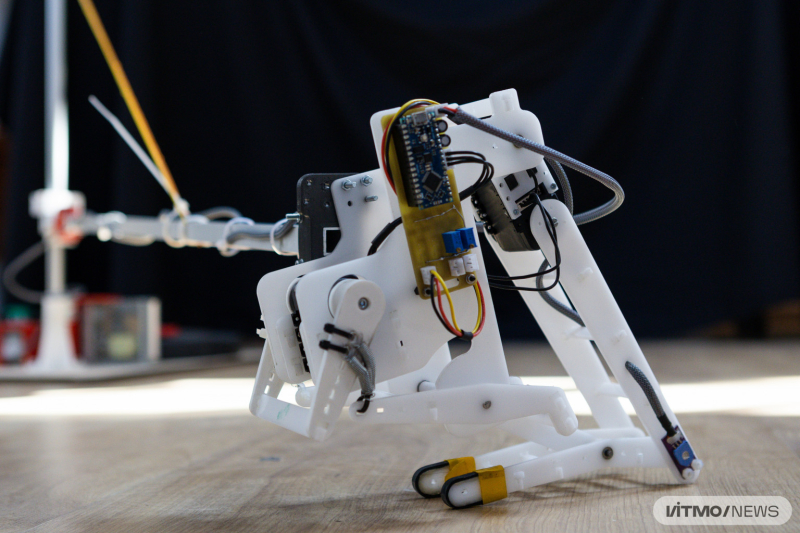
На основе предложенного метода ученые ИТМО создали прыгающего робота, который может не только прыгать на месте, но и передвигаться по пересеченной местности. Устройство перемещается в режиме автоколебаний за счет работы привода и пружин, у него можно изменять скорость и направление движения. Разработанный метод позволил снизить требования к производительности электропривода робота в 4 раза. Чтобы создать робота с такой же производительностью классическими методами, нужно использовать более мощные и энерготребовательные приводы.
Как отмечает Иван Борисов, предложенный метод позволяет «выжать» максимум из комплектующих, максимизировать эффективность приводов, а также снизить энергопотребление за счет возвращения энергии с помощью эластичных элементов.
Что дальше
Разработанный метод ученые ИТМО представят на международной конференции по робототехнике IEEE International Conference on Robotics and Automation, которая считается одной из самых престижных в своей сфере (ее SJR равен 1,92). В этом году ИТМО станет единственным российским участником ICRA.
Кроме того, сейчас на основе предложенного метода исследователи создают программный продукт, который будет автоматически генерировать дизайн робототехнической системы. С помощью фреймворка можно будет создавать конструкцию роботов, траектории управляющих приводов, а также проверять полученные решения в имитационной среде.
В ИТМО уже создали такую программу для захватных устройств. Чтобы получить алгоритм по созданию робота, в программу достаточно загрузить объект, который нужно захватить и при необходимости отредактировать отдельные параметры. Например, если вы хотите создать устройство, которое будет хватать яблоки, достаточно указать характеристики фрукта (его форму, размер и другие параметры), и алгоритм сам сгенерирует структуру механизма, оптимизирует геометрические параметры и значения усилий в сочленениях, которые нужно приложить. Сейчас ученые работают над аналогичным алгоритмом, который будет генерировать механизмы открытой кинематики для шагающих роботов.
По словам разработчиков, метод имеет случайный характер, а пространство решений не ограничено. Это значит, что под одну задачу программа может создать несколько решений, из которых человек выберет наиболее подходящее.
Алгоритмы призваны помочь проектировщикам создавать механизмы для различных мехатронных и робототехнических систем. Специалисты смогут разрабатывать устройства, которые работают изолированно от окружения — например, индустриальных роботов для сварки и покраски, роботов для позиционного управления объектами, а также таких, которые взаимодействуют со средой — коллаборативных и манипуляционных роботов.